
David Mandala of Canonical talked at Linux.Conf.Au on 18th of January 2012 about Ubuntu for ARM and the move from netbook to server support. You can read my notes below, or jump at the end of this post to watch the presentation. The Past 2008: Ubuntu decides to only support ARMv7 architecture vs. Debian that supports ARMv4 and above. 2009: Ubuntu release for Freescale i.MX51 (ARMv5 built), and then Marvell ARMAVA with ARMv6 and VFP (ARM floating point unit) support. 2010: April (10.04) The first ARMv7 release for OMAP3 (Beagleboard) with VFP, Thunb2, NEON and SMP for ARM and first netbook edition October (10.10) Pandabord (OMAP4) release with initial device tree support for ARM. Starts work with Linaro. 2011: 11.04 (5th release) – Supports OMAP3 and OMAP4 only. The netbook edition is using Qt, further improvement to device tree, further work with linaro and on the way to the Unified […]
Linaro 11.12 Release with Kernel 3.1.5
Linaro has just released version 11.12 based on Linux Kernel 3.1.5 and further support for Android 4.0 including graphics hardware acceleration on Snowball and Origen development boards. Here are the highlights of the release: Android Linaro ICS is built with the Linaro toolchain. Linaro ICS is running on all supported boards. DS-5 with Gator is supported in all Linaro Andoid ICS builds. The latest version of libpng (1.5.7) has been integrated in Linaro ICS. An AOSP master build is now available from linaro. ARM® Mali™ Hardware Accelerated Graphics is supported on Origen and Snowball. libjpeg-turbo has been integrated into all Andoid ICS builds. Developer Platform The linux-linaro and lt-panda kernel packages are now automatically generated by the CI build scripts DS-5 with Gator is supported in all Ubuntu LEB builds. XBMC packages, with Gstreamer and OpenGLES support, are now available at the Ubuntu Overlay (supporting only Panda initially) U-Boot-Linaro is […]
Android 4.0 on BeagleBoard and Beagleboard-xM
Sola has written the instructions (in Japanese) to build Android 4.0 (ICS) for Beagleboard and Beagleboard-xM. Here’s the same in English: Get the source code: $ mkdir -p /home/sola/work/ics $ cd /home/sola/work/ics $ export ANDROID_ROOT=$PWD $ repo init -u https://bitbucket.org/sola/android_manifest $ repo sync -j8 Build Android: $ cd $ANDROID_ROOT $ source build/envsetup.sh $ lunch full_beagleboard_xm-eng [for BeagleBoard-xM] $ lunch full_beagleboard-eng [for BeagleBoard] $ time make -j8 Generate the rootfs: $ cd $ANDROID_ROOT/out/target/product/beagleboard_xm/ [for BeagleBoard-xM] $ cd $ANDROID_ROOT/out/target/product/beagleboard/ [for BeagleBoard] $ mkdir rootfs $ sudo cp -a ./root/* ./rootfs/ $ sudo cp -a ./system/* ./rootfs/system/ Build the kernel: $ export ARCH=arm $ export CROSS_COMPILE=$ANDROID_ROOT/prebuilt/linux-x86/toolchain/arm-eabi-4.4.3/bin/arm-eabi- $ cd $ANDROID_ROOT/board/beagleboard/kernel $ make omap3_beagle_android_defconfig $ make uImage modules -j8 Partition the SD card (bootloader, media, rootfs): $ cd $ANDROID_ROOT/board/beagleboard/sdcard $ sudo LANG=C ./mksdcard_beagle.sh /dev/sdx where /dev/sdx depends on your setup (e.g. /dev/sda). Generate boot.scr: $ cd $ANDROID_ROOT/board/beagleboard/bootscript $ ./mkbootscr Copy MLO/u-boot.bin/uImage/rootfs to the SD card: […]
OpenMAX (Open Media Acceleration)
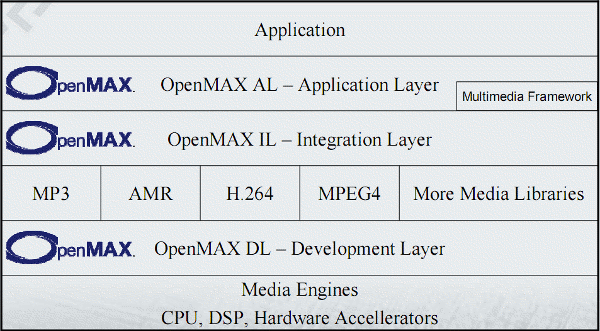
OpenMAX (Open Media Acceleration) is a royalty-free, cross-platform set of C-language programming interfaces that provides abstractions for routines especially useful for audio, video, and still images. OpenMAX standard is managed by the non-profit technology consortium Khronos Group. OpenMAX allows developers to take advantages of hardware media decoding/encoding. For example, If you want to play video using Raspberry Pi hardware (VideoCore IV GPU in Broadcom BCM2835) you’ll have to use OpenMAX IL. OpenMAX provides three layers of interfaces: Application Layer (AL): Open standard for accelerating the capture, and presentation of audio, video, and images in multimedia applications on embedded and mobile devices. Integration Layer (IL) : API defining a standardized media component interface to enable developers and platform providers to integrate and communicate with multimedia codecs implemented in hardware or software. Development Layer (DL): APIs containing a comprehensive set of audio, video and imaging functions that can be implemented and optimized […]
Linaro’s Android Platform – ELCE 2011
Zach Pfeffer, Linaro Android Platform team leader, describes Linaro’s work on the Android platform and future plans at Embedded Linux Conference Europe 2011. Abstract: Linaro uses components from the Android Open Source Project, member companies, community supported efforts and Linaro engineering teams to build integrated, easy-to-use and well tested Android platforms for upstream work, product baselines and hobby projects. The team currently has platforms for TIs PandaBoard, BeagleBoard and Beagle xM, ST Ericsson’s Snowball, Samsung’s Origen and Freescale’s iMX53. They recently released platforms with Android 2.3.4 built against GCC 4.6 and running the 3.0 Linux kernel. In this session Zach reviews what’s been done, the Linaro Android concept, how Linaro brings Android together and what their plans are. Jean-Luc Aufranc (CNXSoft)Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later […]
Linaro 11.10 Release with Linux Kernel 3.1
Linaro has just released version 11.10 based on Linux Kernel 3.1. Here are the highlights of the release: Android Audio playback and recording works on LEB-panda. TJBench into all Android builds benchmarked against the original Android libjpeg implementation: TomGall/LibJpegTurbo All strict-aliasing violations in 2.3.5 have been fixed and sent to AOSP. (for build optimization) Linaro Gerrit is integrated with Android Build Service for change verification as part of Continuous Integration effort. Tip toolchain tracked and released against all targets for 11.10. iMX53 will now boot with a 3.0 or later Android Kernel. The multimedia test application has been extended to cover encoding and give better benchmark results. Linaro’s Android distribution can now base builds off a tip toolchain build. Linaro’s 11.09 toolchain has been benchmarked. USB camera (UVC) now works on linaro-android builds. Developer Platform The Linux Linaro packages are now generated and validated in a continuous integration loop. New […]
Xibo Digital Signage on ARM (Full Version)

Last month, I wrote a post showing how to run Xibo Open Source Digital Signage in a BeagleBoard/Overo emulator. That version could communicate with Xibo server, download the required files, display pictures and (maybe) play videos with the real hardware. However, it had serious limitation as Text, RSS and web pages could not be displayed. I’ve now fixed those issues and the full Xibo 1.3.1 can run on ARM platform. First, you need to follow the instructions given in Xibo Digital Signage on ARM (Beagleboard / Overo), although we’ll need to modify something with libavg compilation (see below). Then cross-compile berkelium for ARM using Linaro toolchain. Add libbrowser-node to libavg plugin directory and build libavg again. Also copy the Berkelium header files in to src/test/plugin (i.e. src/test/plugin/berkelium) or add the include file path to CFLAGS/CXXFLAGS.
|
1 2 3 4 5 |
bzr branch lp:~browsernode-team/+junk/berkelium-browsernode cp berkelium-browsernode/plugin/* ~/edev/beagleboard/libavg-1.6.0/src/test/plugin cd ~/edev/beagleboard/libavg-1.6.0 make make install |
Create libberkeliumwrapper.so:
|
1 2 3 4 |
cd ~/edev/beagleboard/libs/lib touch a.cpp arm-linux-gnueabi-g++ -c a.cpp -o a.o arm-linux-gnueabi-g++ a.o -shared -L/home/jaufranc/edev/beagleboard/berkelium -llibberkelium -o libberkeliumwrapper.so |
Copy the required files to the qemu image: sudo mount -o […]
BeagleBone: New 89 USD Beagleboard

The BeagleBone is a low-cost, high-expansion hardware-hacker focused BeagleBoard. It is a bare-bones BeagleBoard that acts as a USB or Ethernet connected expansion companion for your current BeagleBoard and BeagleBoard-xM or works stand-alone. The BeagleBone is smaller than the previous version of BeagleBoards (looks like the business of a credit card) and features TI Sitara™ AM3358 Cortex A8 processor clocked at 700Mhz. The BeagleBone is also able to run a full-featured Linux. Here are the current hardware specifications: TI AM3358 ARM Cortex-A8 @ 700 MHz 256 MB DDR2 RAM Board size: 3.4″ x 2.1″ Shipped with 2GB microSD card with the Angstrom Distribution with node.js and Cloud9 IDE Single cable development environment with built-in FTDI-based serial/JTAG and on-board hub to give the same cable simultaneous access to a USB device port on the target processor Industry standard 3.3V I/Os on the expansion headers with easy-to-use 0.1″ spacing On-chip Ethernet, not […]