
Sascha Hauer, kernel developer at Pengutronix, gives an update about the status of Barebox bootloader at the Embedded Linux Conference 2012 in Barcelona, Spain. Abstract: Booting Linux is still a hot topic on embedded systems. It has been 3 years since the last presentation about Barebox at ELC-E, and the barebox community has grown and developed many new and unique features during that time. The talk gives an update on the status of barebox, including MMU support, compressed images, menu system, automouter, tftp, nfs filesystem, USB updating techniques and other goodies. The presentation is for kernel porters who need a robust, flexible,extensible and well structured tool to bring up Linux on embedded hardware. It is equally suitable for new and experienced barebox users. Agenda of the talk: Tour through Barebox – Basic hardware initialization (SDRAM, clocks), Startup, User Interface, Start operating system, Update and Initial hardware bring-up. Devicetree support Multi-platform […]
Upgrading Embedded Linux Without Bricking – ELCE 2012
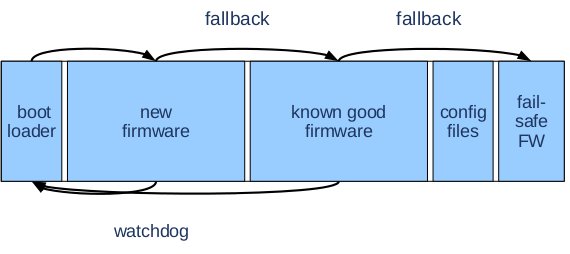
Arnout Vandecappelle, senior embedded software architect at Essensium/Mind, talks about ways to greatly decrease the risk of bricking your board/device during upgrade thanks to gubies scripts and tools at the Embedded Linux Conference in Barcelona, Spain, on November 6, 2012. Abtract: Embedded systems are often modified remotely, e.g. to upgrade the firmware or change the configuration. This may however break the system and render it inaccessible, which is a major problem if the device is hard to reach physically. Unfortunately, no catch-all failsafe solution exists to make sure that the device stays accessible remotely even if a modification goes wrong. Instead, the possible failures have to be anticipated and covered. This talk discusses some of the frequently occurring failures, how they can be detected and handled. These include power failure, kernel crashes, network failure and data corruption. We include examples of concrete use cases. Finally, there is room for discussion about […]
The End of Embedded Linux (As We Know It) – ELCE 2012
Chris Simmonds, freelance consultant and trainer (2net ltd), discusses the future of embedded Linux now that storage and processing power are no longer an major issue, and try to find the best Linux platform for embedded systems at ELCE 2012. Abstract: Embedded Linux is at a cross roads where the combination of Moore’s law making devices more powerful and the mass production of consumer devices, especially mobile, making them cheaper means that the old ways no longer work. Only a few years ago we though in mega: MHz, MBytes, MBits/s. Now we have to think in giga. The days of the single core CPU are almost over, as are the days of the QVGA display. All this means that there is a need to re-think how embedded devices are programmed. Two obvious roads lie ahead: Android and Ubuntu (or other desktop operating system of your choice). This talk considers the […]
FFSB and IOzone: File System Benchmarking Tools, Features and Internals – ELCE 2012
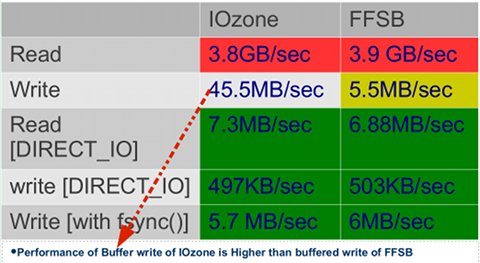
Keshava Munegowda and Sourav Poddar, software engineers at Texas Instruments, give a presentation about 2 relatively new file system benchmarks: The Flexible Filesystem Benchmark (FFSB ) and IOzone at the Embedded Linux Conference Europe 2012. Abstract: The IOzone is widely used File System Bench-marking tool in both linux and windows systems. The Flexible Filesystem Benchmark (FFSB) is a new cross-platform file-system performance measurement tool. It uses custom profiles as input to measure multiple file systems read/write performances. This paper identifies and compares these file system benchmarking tools in terms of the optimal usage techniques such as buffer size, number of threads, number of write blocks etc. Internals and features of these tools , and the necessary steps involved in the porting of benchmarking tools to different platforms are also discussed. The depicted file system benchmarking performance numbers, in this paper, are measured in both x86 PCs and ARM based SOC […]
Understanding PREEMPT_RT (The Real-Time Patch) – ELCE 2012
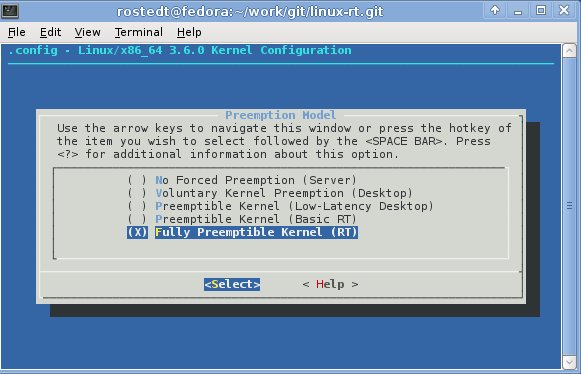
Steven Rostedt, working at Red Hat, talks about Real-Time Linux at the Embedded Linux Conference Europe, in Spain on November 6, 2012. Abstract: The real-time patch (which provides CONFIG_PREEMPT_RT), has been around since 2005. Started by Ingo Molnar and maintained by Thomas Gleixner and several others, it has grown from a hobby RTOS into a very serious contender. Several distributions (Red Hat, SuSE, Debian, Ubuntu) supply a kernel version that includes this patch. The embedded world has started adding the -rt patch to their own devices that they ship. But do the embedded developers understand what the -rt patch supplies? Programming for real time, and especially when writing kernel code requires special knowledge to avoid real time traps. This talk will explain what the real time patch provides and special programming tips that will ensure embedded developers will get the best from their devices. He goes through the following key […]
Board Bringup: You, Me, and I2C – ELCE 2012
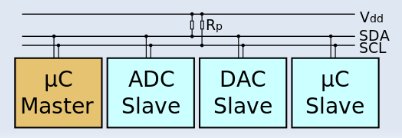
David Anders, embedded systems developer at Texas Instruments, explains how to work with I2C in Linux based embedded systems at ELCE 2012. Abstract: Board bring up is one of the most under documented aspects of embedded development. I2C is such a powerful, low-cost, and ubiquitous method of communication, that a basic understanding of it’s usage is essential to the embedded linux developer to quickly bring up and debug embedded designs. This presentation will look at the various software and hardware aspects of working with I2C using simple case studies highlighting the implementation of an EEPROM and a GPIO Expander. Most embedded Linux developers at some point in their career will be handed a piece of hardware that is untested. This presentation intends to provide some information about core tools and methods for bring up of I2C interfaces and assorted I2C based peripheral devices. David Anders has previously presented at Embedded […]
Supporting 200 Different Expansions Boards: The Broken Promise of Device Tree – ELCE 2012
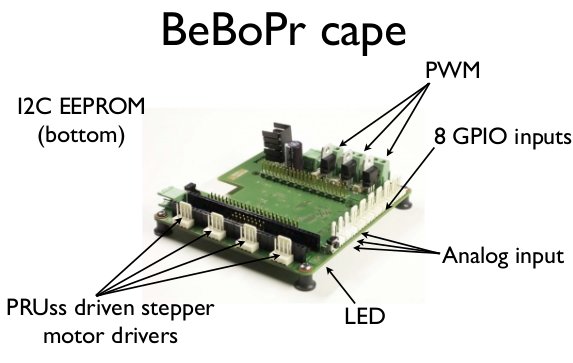
Koen Kooi, software engineering manager at Circuitco Electronics and lead developer of the Angstrom distribution, explains that device tree does help with the ARM Linux kernel, but brings all the complexity to the bootloader(s), taking the variety of Beaglebone capes as example, at the Embedded Linux Conference in Barcelona, Spain, on November 6, 2012. Abstract: Devicetree is marketed as the one ring to rule them all when it comes to non-discoverable hardware for Linux on ARM. The problem with devicetree is that the complexity gets removed from the kernel and put into the bootloader. Koen first gives an overview of device tree, and provides an example (am33xx.dtsi) to show device tree data structure. Then time for some Beaglebone and capes promotion overview, before moving to the core of the problem: Pinctrl Resource tracking EVM/bone split uboot/uimage/dtb lockstep pdata only Keycodes and other non-hardware bits You can also download the presentation […]
Your New ARM SoC Linux Support Check-List – ELCE 2012
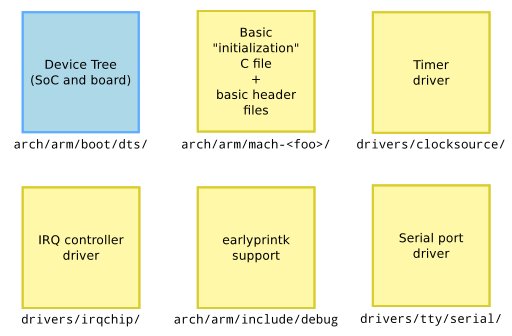
Thomas Petazzoni, embedded Linux engineer and trainer at Free Electrons, describes the steps he followed to add a new Marvell SoC to the mainline kernel at ELCE 2012. Abstract: Since Linus Torvalds raised warnings about the state of the ARM architecture support in the Linux kernel, a huge amount of effort and reorganization has happened in the way Linux supports ARM SoCs. From the addition of the device tree to the pinctrl subsystem, from the new clock framework to the new rules in code organization and design, the changes have been significant over the last one and half year in the Arm Linux kernel world. Based on the speaker’s experience on getting the support for the new Marvell Armada 370 and Armada XP SoC support in the mainline Linux kernel, we will give an overview of those changes and summarize the new rules for ARM Linux support. We aim at […]