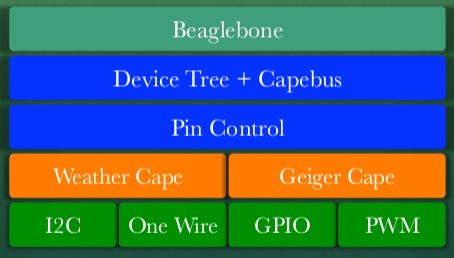
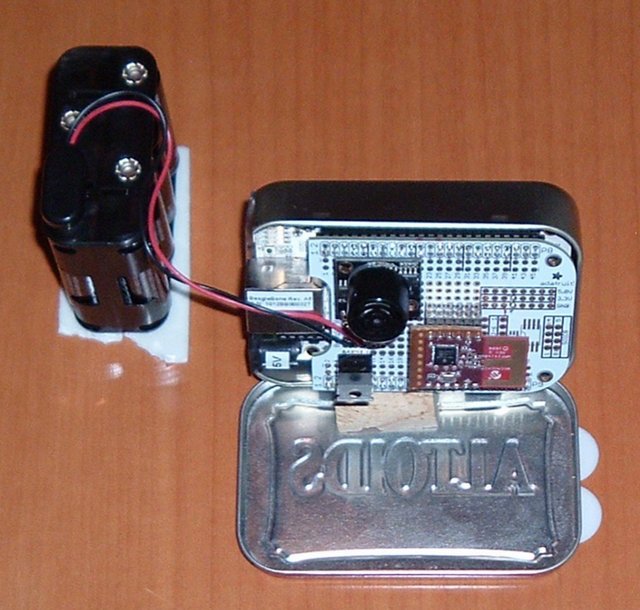
Matt Ranostay, technical staff at Ranostay Industries, gives a presentation about a telemetry system based on Beaglebone at the Embedded Linux Conference Europe on November 5, 2012. Abstract: The author will discuss his ongoing and other team members efforts to develop hardware and software that reports sensor data to the community. This talk will be split into several parts a) types of useful sensors b) hardware design of Beaglebone capes c) and telemetry reports to Pachube/Cosm. Demonstrating that in the new world of cheap prototyping boards with I2C, GPIO, and SPI that anyone can setup a decent monitoring system for home security, automation, and weather reporting. There will be a live demo of prototype geiger counter + weather station. The audience targeted is the professional hobbyist who likes to hack on microcontrollers in their spare time. It will take little to medium knowledge of electrical engineering to follow this talk. […]
Beaglebone: The Perfect Telemetry Platform? – ELCE 2012