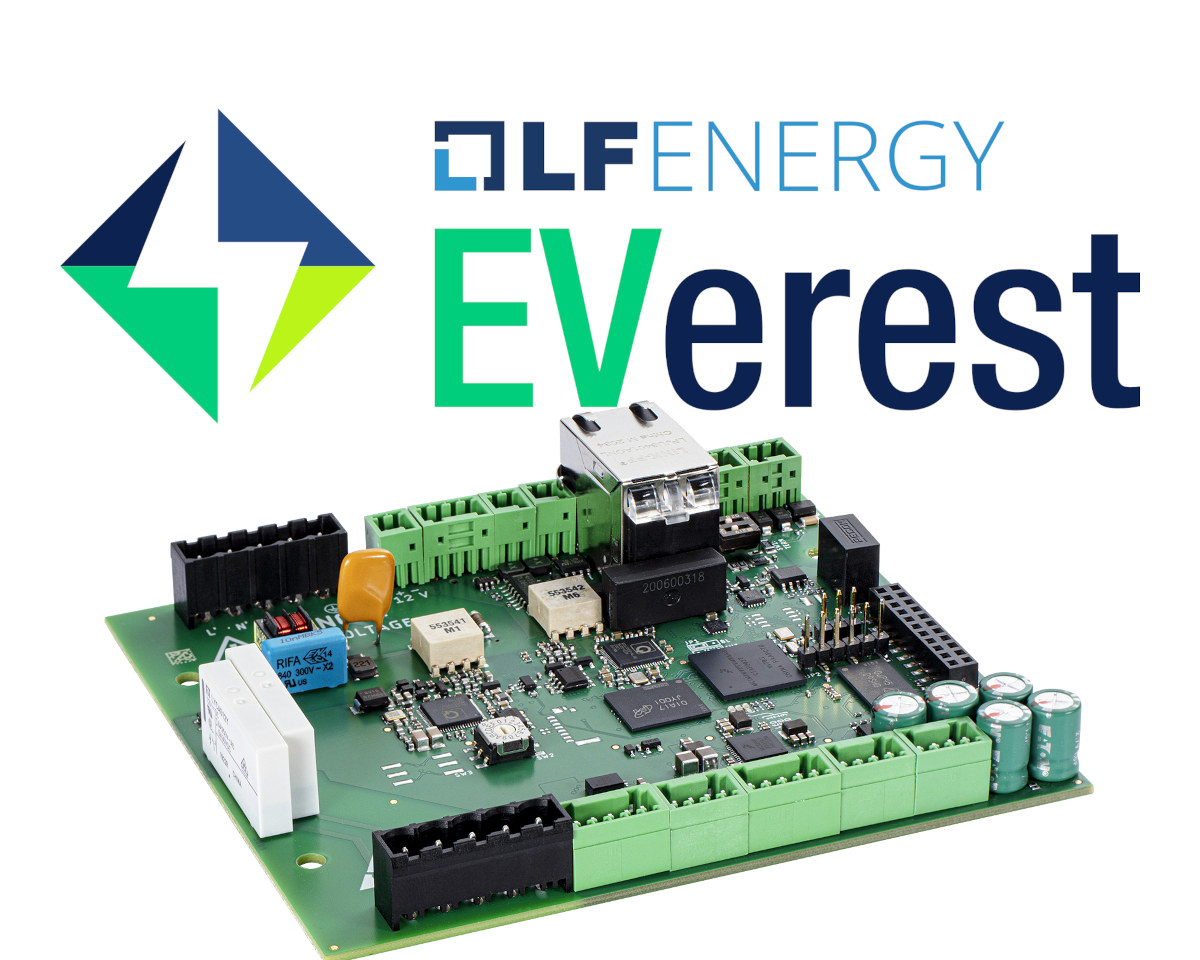
EVerest is a software project initiated by PIONIX GmbH, but now part of the Linux Foundation’s LFEnergy initiative, whose primary goal is to develop and maintain an open-source software stack for EV charging infrastructure. EVerest supports multiple standards and it will run on any device from AC home chargers to public DC charging stations. I noticed the EVerest project in an upcoming talk at the Embedded Open Source Summit 2023 entitled ” EVerest: Electric Vehicle Chargers With Open Hardware and Software” and whose abstract reads in part: You will learn how to build your own electric vehicle charger using open hardware designs in combination with the EVerest open-source software stack for EV charging infrastructure. Following a quick introduction to EV charging technology, with explanations of the standards, protocols, and complexities involved, the talk will go into a deep dive into how you can build your own AC charging station. Reference […]
EVerest is an open-source software stack for car charging stations