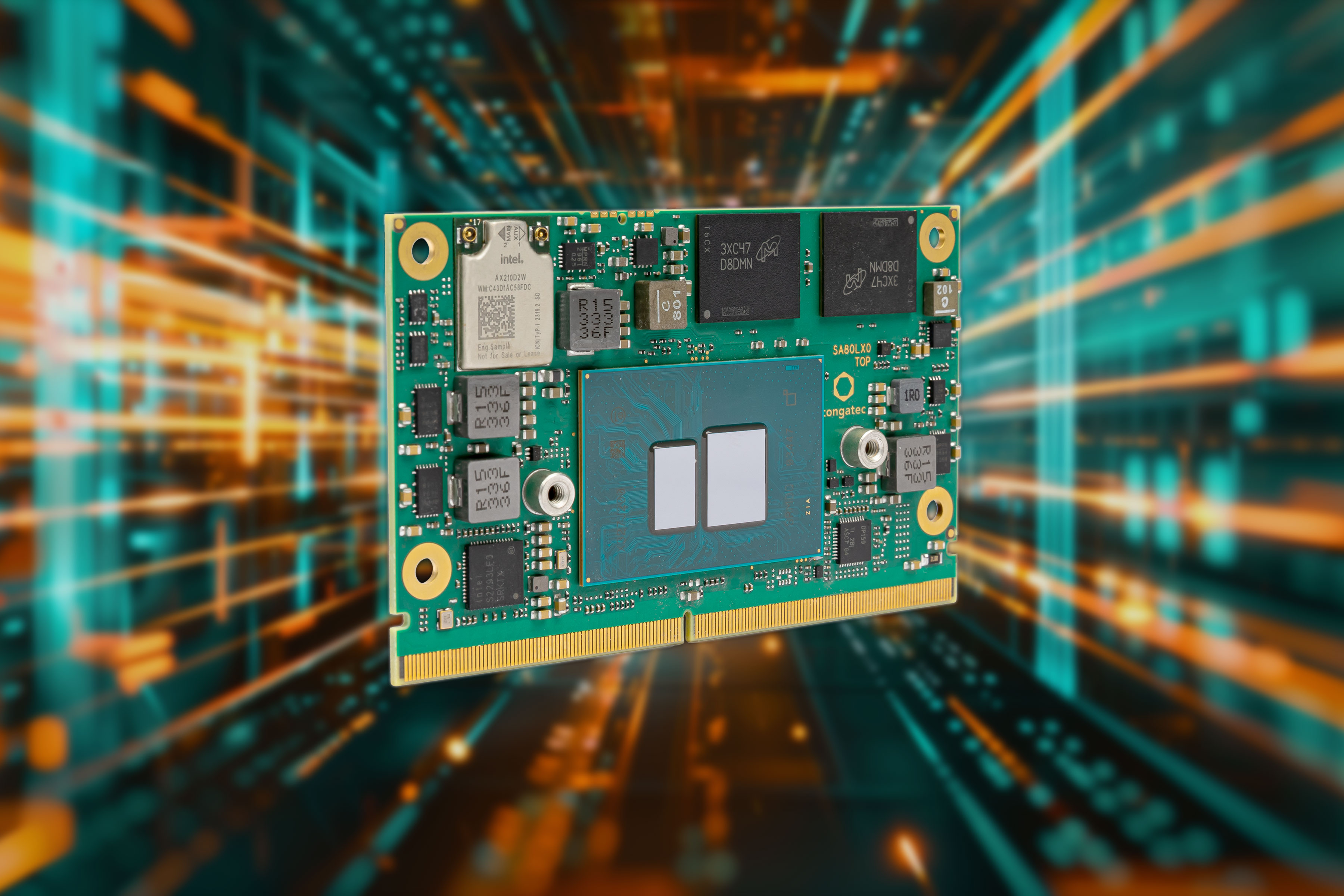
Congatec’s new conga-SA8 SMARC modules are powered by the Intel Atom x7000RE “Amston Lake” processors. With twice the processing cores and similar power consumption to the previous generation, congatec’s new credit-card-sized modules are “intended for future-facing industrial edge computing and powerful virtualization.” An Intel Core i3‑N305 Alder Lake-N processor is also offered as an alternative to the Intel Atom x7000RE series for high-performance IoT edge applications. The conga-SA8 modules support up to 16GB LPDDR5 onboard memory, 256GB eMMC 5.1 onboard flash memory, and offer several high-bandwidth interfaces such as USB 3.2 Gen 2, PCIe Gen 3, and SATA Gen 3. The integrated Intel UHD Gen 12 graphics processing unit has up to 32 execution units and can power three independent 4K displays. The conga-SA8 is described as virtualization-ready and has a hypervisor (virtual machine monitor) integrated into the firmware. The RTS hypervisor takes complete advantage of the eight processing cores […]
congatec conga-SA8 Amston Lake SMARC modules are targeted at industrial edge applications