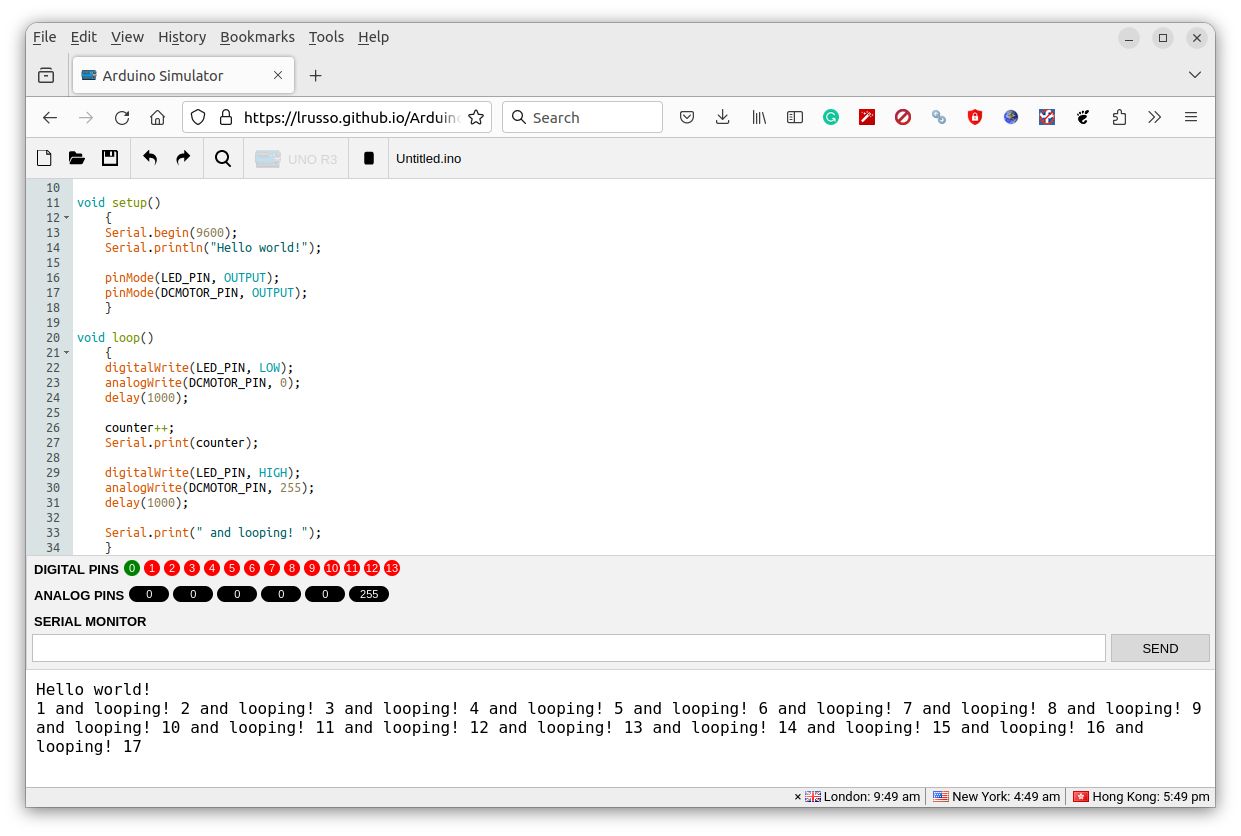
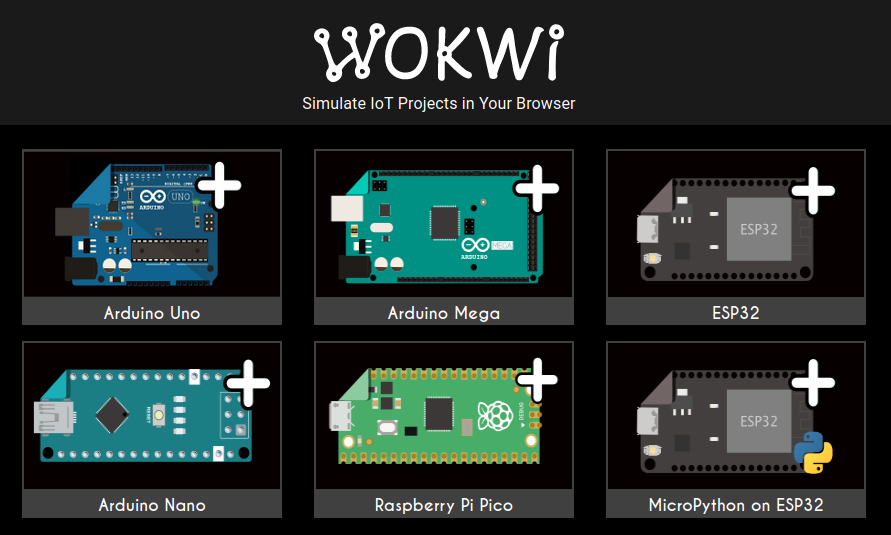
Leonardo Russo’s ArduinoSimulator is an open-source Arduino Simulator written in JavaScript that runs code directly in your web browser and shows the serial output and digital/analog pins status for various Arduino boards namely Arduino UNO R3, MEGA1280, MEGA2560, and NANO V3. We previously covered the Wokwi simulator for ESP32. Arduino, and Raspberry Pi RP2040 that’s a great little tool for educators to emulate circuits and run code right in a web browser, and it even supports the ESP32-P4 wireless MCU although it’s yet to be released. While the simulators are written in JavaScript and open-source, the tool itself is not, and for instance, you can’t run a self-hosted instance of Wokwi or use it offline. The ArduinoSimulator is fully open-source and runs entirely from a web browser. It’s not quite as complex and full-featured as Wokwi, as you can’t build your own circuits, but you still have an area to […]
ArduinoSimulator is an open-source Arduino Simulator that runs in your web browser