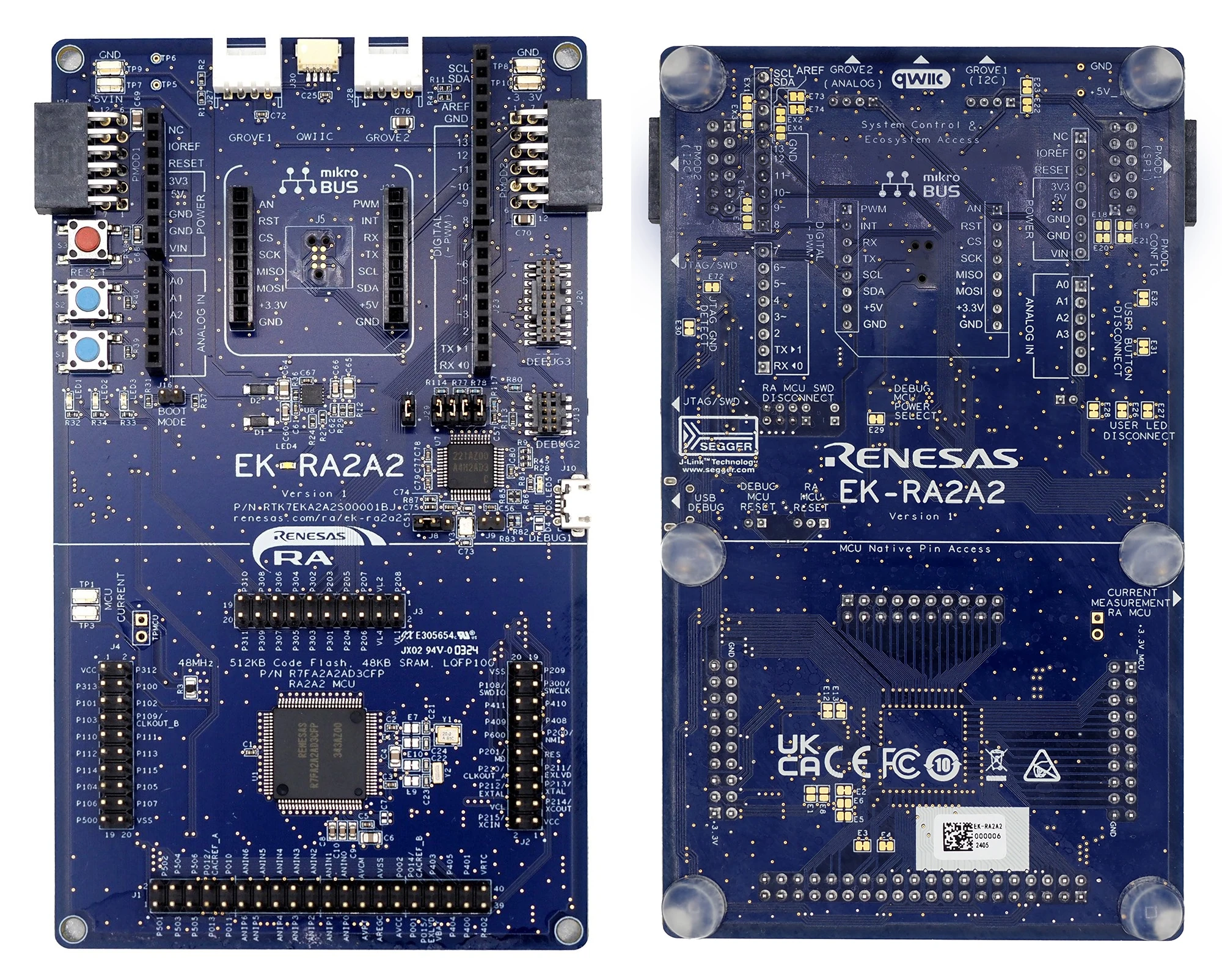
Renesas Electronics RA2A2 Arm Cortex-M23 microcontroller (MCU) group offers a 7-channel high-resolution 24-bit Sigma-Delta ADC, as well as dual-bank flash and bank swap function for an easier implementation of firmware over-the-air (FOTA) updates. The 48MHz MCU also comes with 48KB SRAM, up to 512KB code flash, various interfaces, and safety and security features that make it suitable for smart energy management, building automation, medical devices, consumer electronics, and other IoT applications that can benefit from high-resolution analog inputs and firmware updates. Renesas RA2A2 specifications: MCU core – Arm Cortex-M23 Armv8-M core clocked at up to 48 MHz Arm Memory Protection Unit (Arm MPU) with 8 regions Memory 48 KB SRAM Memory Protection Units (MPU) Memory Mirror Function (MMF) Storage Up to 512 KB code flash memory in dual bank (256 KB × 2 banks); bank swap support 8 KB data flash memory (100,000 program/erase (P/E) cycles) Peripheral interfaces Segment LCD […]
Renesas RA2A2 Arm Cortex-M23 microcontroller offers high-resolution 24-bit ADC, up to 512KB dual-bank flash