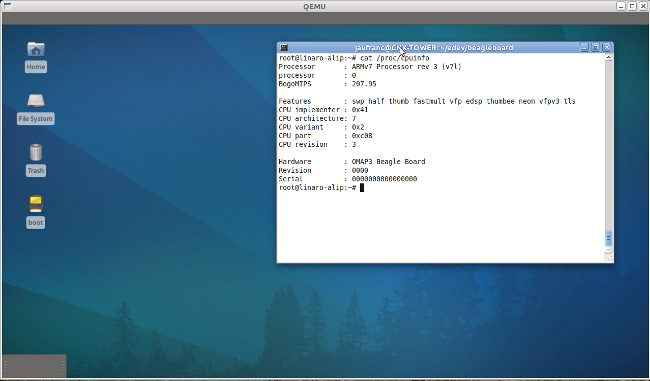
I previously posted instructions to install and run nano and ARM Linux Internet Platform (ALIP) distribution images for Overo and Beagleboard on QEMU, If the image support networking, you could use ssh (install dropbear server in qemu) or nfs to transfer files between the host computer and qemu, or even run your program from the NFS share. This should be possible to do that on the Overo emulator since it support Ethernet. However, although I can access Internet, I cannot access the host via ssh as the host is in a private subnetwork (192.168.0.0) and qemu in another (10.0.2.0). We would probably have to enable bridge networking for that but the tun driver is apparently not compiled in ALIP kernel. I’ll look into that later on. [Update: Finally, we don’t need tun/tap to make this work, please read http://www.cnx-software.com/2011/10/02/how-to-transfer-files-between-host-and-qemu-via-ssh-and-nfs/ for details.] Today, I’ll just show how to mount a Qemu […]
How to Transfer files between Host and Qemu