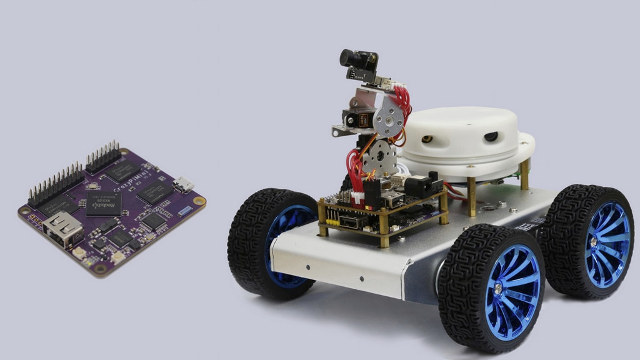
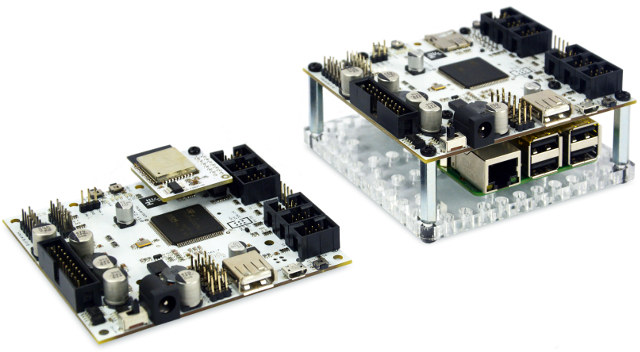
ADLINK has launched ROScube Pico SBC designed for robotics projects and powered by either an Intel Atom x5 Apollo Lake processor or a Rockchip PX30 Arm Cortex-A35 processor via their SMARC-compliant system-on-modules namely LEC-AL and as LEC-PX30. Both models run Ubuntu and ROS/ROS-2 operating systems simultaneously, and the company also provides NeuronBot robotics development and demo kit based on the SBC. ROScube Pico SBC and Devkit If ROScube Pico looks similar it’s because it appears to be based entirely on ADLINK previously announced ADLINK Industrial-Pi (I-Pi) SMARC Development Kit based on Rockchip PX30, and Vizi-AI development starter kit based on Atom x5-E3940 SoC and Movidius Myriad X VPU. Those are the specifications listed for ROScube Pico: SMARC Module For ROScube Pico NPS-1 – LEC-AL with Intel Atom processor, Intel Movidius Myriad X AI accelerator, 8GB LPDDR4 RAM, 32GB eMMC For ROScube Pico NPS-4 – LEC-PX30 with Rockchip PX-30 quad-core Cortex-A35 […]
ROScube Pico SBC Runs Ubuntu & ROS on Intel Atom or Rockchip PX30 Processor