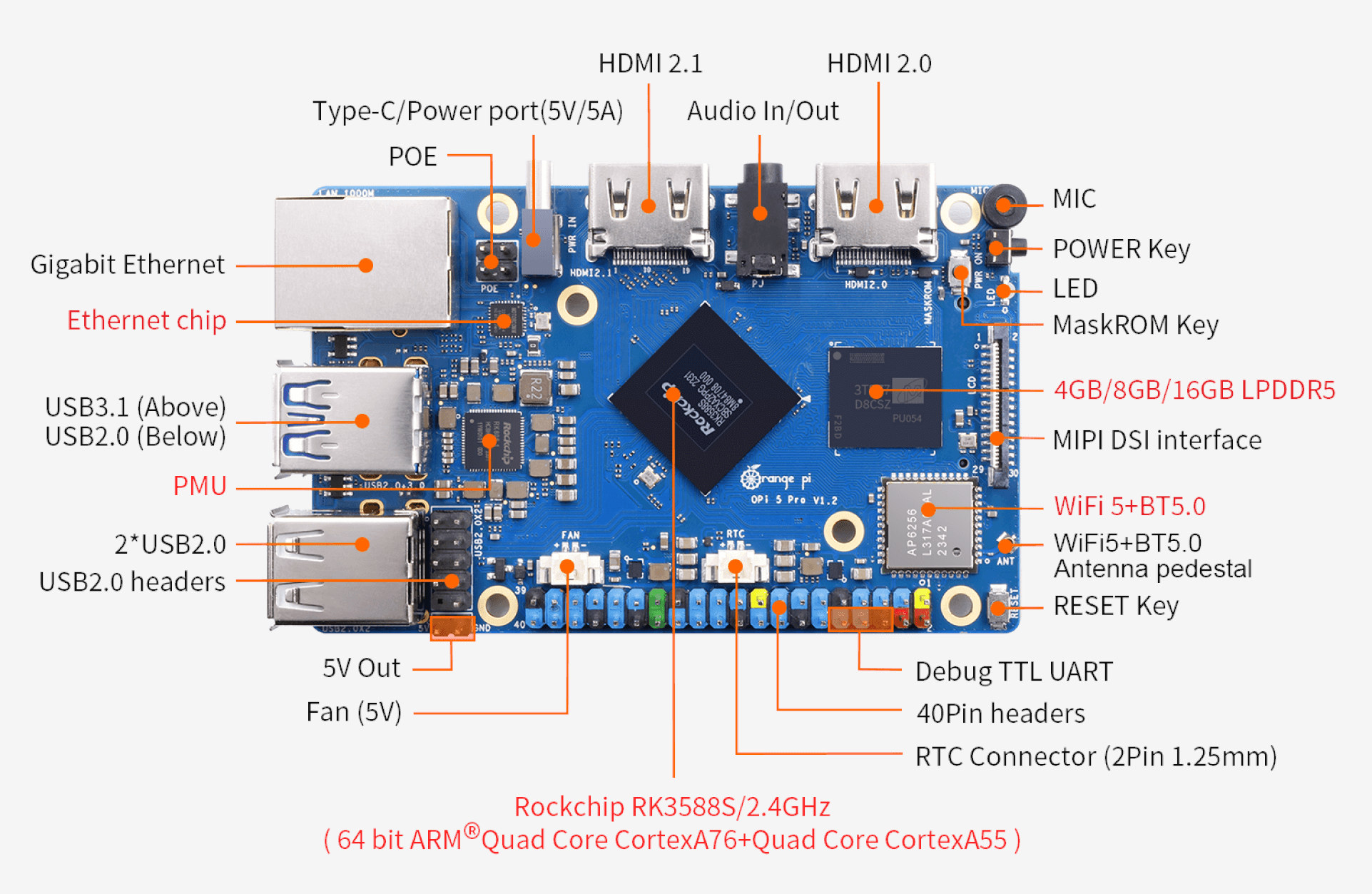
As mentioned in the Orange Pi Developer Conference 2024 article, the Orange Pi 5 Pro launch was just around the corner, and the latest Rockchip RK3588S SBC is now available on Amazon or Aliexpressfor $109 and up with 16GB LPDDR5 RAM, but cheaper 4GB ($60) and 8GB ($80) variants are coming soon. One would think the Orange Pi 5 Pro would be an evolution of the Orange Pi 5 SBC with LPDDR4 memory, and in some ways it is, but there are enough changes to display ports, storage, wireless, GPIO header, and even the form factor that make a direct comparison challenging. Orange Pi 5 Pro specifications: SoC – Rockchip RK3588S CPU – Octa-core processor with 4x Cortex-A76 cores @ up to 2.4 GHz, 4x Cortex-A55 cores @ up to 1.8 GHz GPU – Arm Mali-G610 MP4 GPU with OpenGL ES 3.2, OpenCL 2.2, and Vulkan 1.2 support VPU – […]
Orange Pi 5 Pro – A low-cost Rockchip RK3588S SBC with up to 16GB LPDDR5 RAM, dual HDMI video output