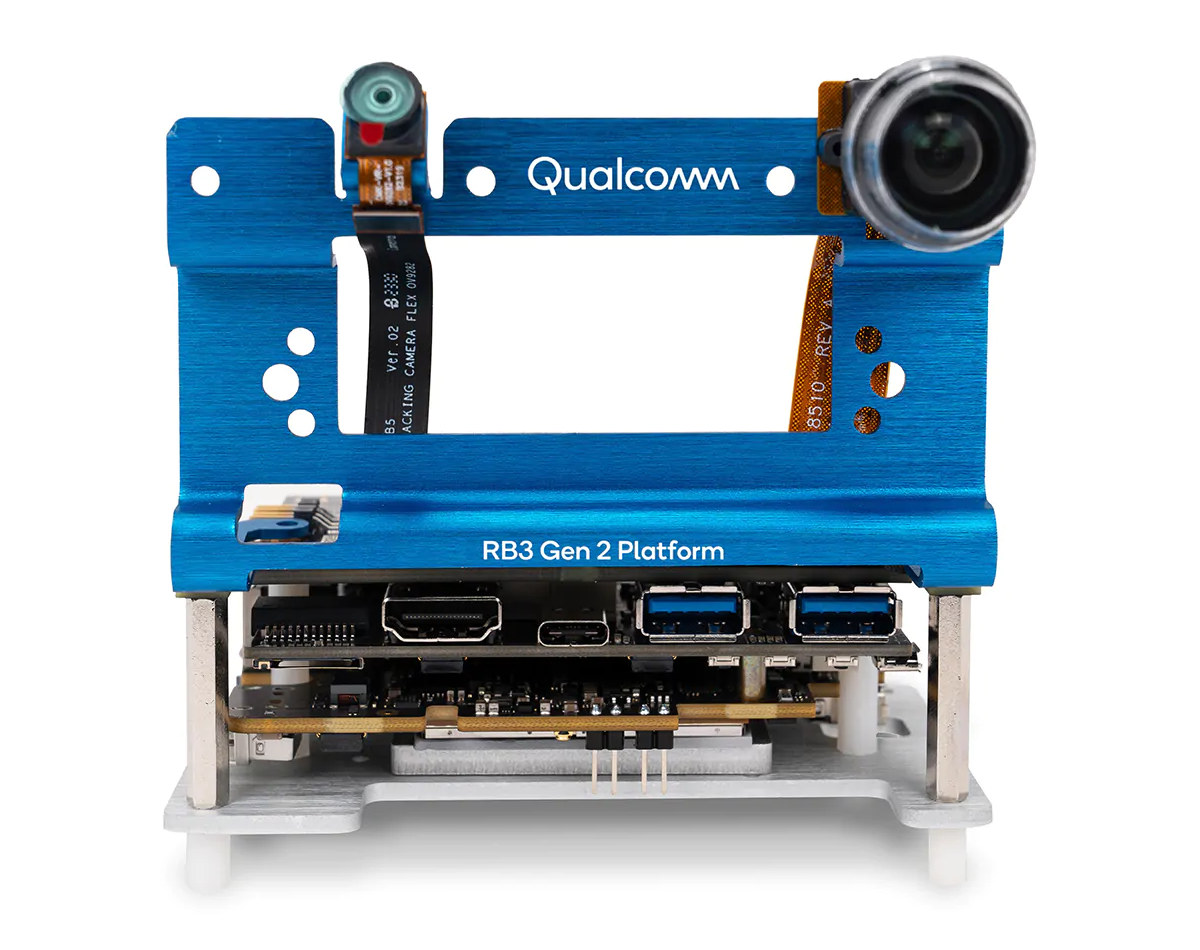
Qualcomm had two main announcements at Embedded World 2024: the ultra-low-power Qualcomm QCC730 WiFi microcontroller for battery-powered IoT devices and the Qualcomm RB3 Gen 2 Platform hardware and software solution designed for IoT and embedded applications based on the Qualcomm QCS6490 processor that we’re going to cover today. The kit is comprised of a QCS6490 octa-core Cortex-A78/A55 system-on-module with 12 TOPS of AI performance, 6GB RAM, and 128GB UFS flash connected to the 96Boards-compliant Qualcomm RBx development mainboard through interposer, as well as optional cameras, microphone array, and sensors. Qualcomm QCS6490/QCM6490 IoT processor Specifications: CPU – Octa-core Kryo 670 with 1x Gold Plus core (Cortex-A78) @ 2.7 GHz, 3x Gold cores (Cortex-A78) @ 2.4 GHz, 4x Silver cores (Cortex-A55) @ up to 1.9 GHz GPU – Adreno 643L GPU @ 812 MHz with support for Open GL ES 3.2, Open CL 2.0, Vulkan 1.x, DX FL 12 DSP – Hexagon […]
Qualcomm RB3 Gen 2 Platform with Qualcomm QCS6490 AI SoC targets robotics, IoT and embedded applications