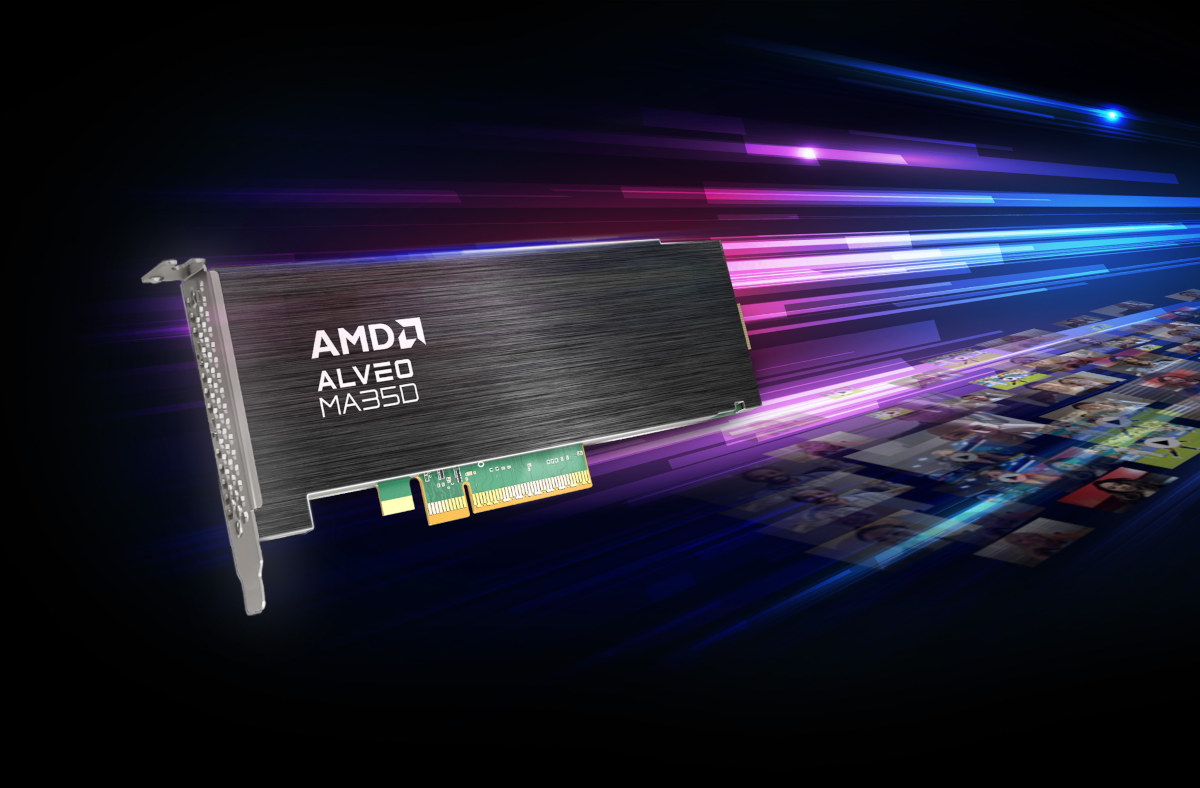
AMD Alveo MA35D media accelerator PCIe card is based on a 5nm ASIC capable of transcoding up to 32 Full HD (1080p60) AV1 streams in real-time and designed for low-latency, high-volume interactive streaming applications such as watch parties, live shopping, online auctions, and social streaming. AMD says the Alveo MA35D utilizes a purpose-built VPU to accelerate the entire video pipeline, and the ASIC can also handle up to 8x 4Kp60, or 4x 8Kp30 AV1 streams per card. H.264 and H.265 codecs are also supported, and the company claims its “next-generation AV1 transcoder engines” deliver up to a 52% reduction in bitrate at the same video quality against “an open source x264 veryfast SW model”. AMD Alveo MA350 highlights: Auxiliary CPU – 2x 64-bit quad-core RISC-V to perform control and board management tasks AI Processor – 22 TOPS per card for AI-enabled “smart streaming” for video quality optimization Memory – 16GB […]
AMD Alveo MA35D media accelerator transcodes up to 32 1080p60 AV1 streams in real-time