Quite a while ago I reviewed the HE3D K280 delta 3D printer. Up until now, I did no mods other than the ones that I completed during the initial build. I have been very happy with it with the exception of the noise caused by inexpensive drivers and the salmon skin due to the drivers as well. The K280 prints big and pretty accurate at modest speeds. Today I am outlining how I upgraded to a Duet 2 Maestro mainboard. With this upgrade, I am jumping from an 8-bit board with generic drivers to a 32-bit board with TMC2224 drivers. The upgrade was quite painless and straightforward but not without a few hiccups. The Maestro is Duet’s entry-level board for about $130. I attempted the Bigtreetech SKR 1.3 with TMC2130’s but the firmware wasn’t quite there yet. I opened an issue on Marlin’s GitHub page which explains the issue in […]
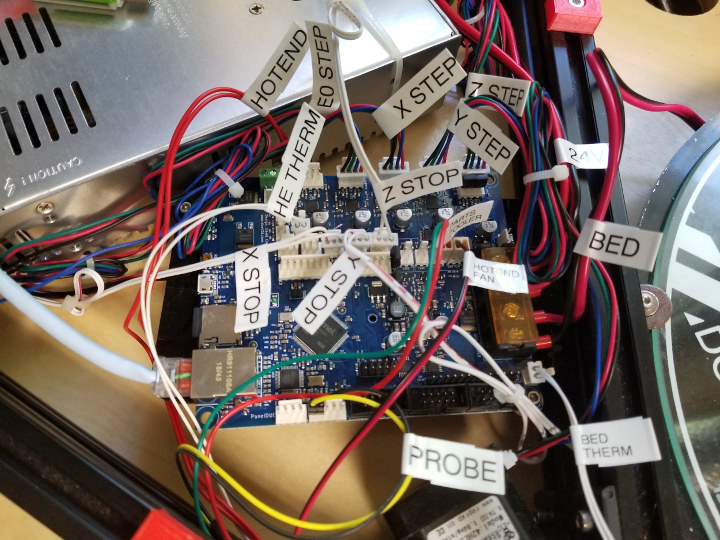
How to install Duet 2 Maestro Board on HE3D K280 3D Printer