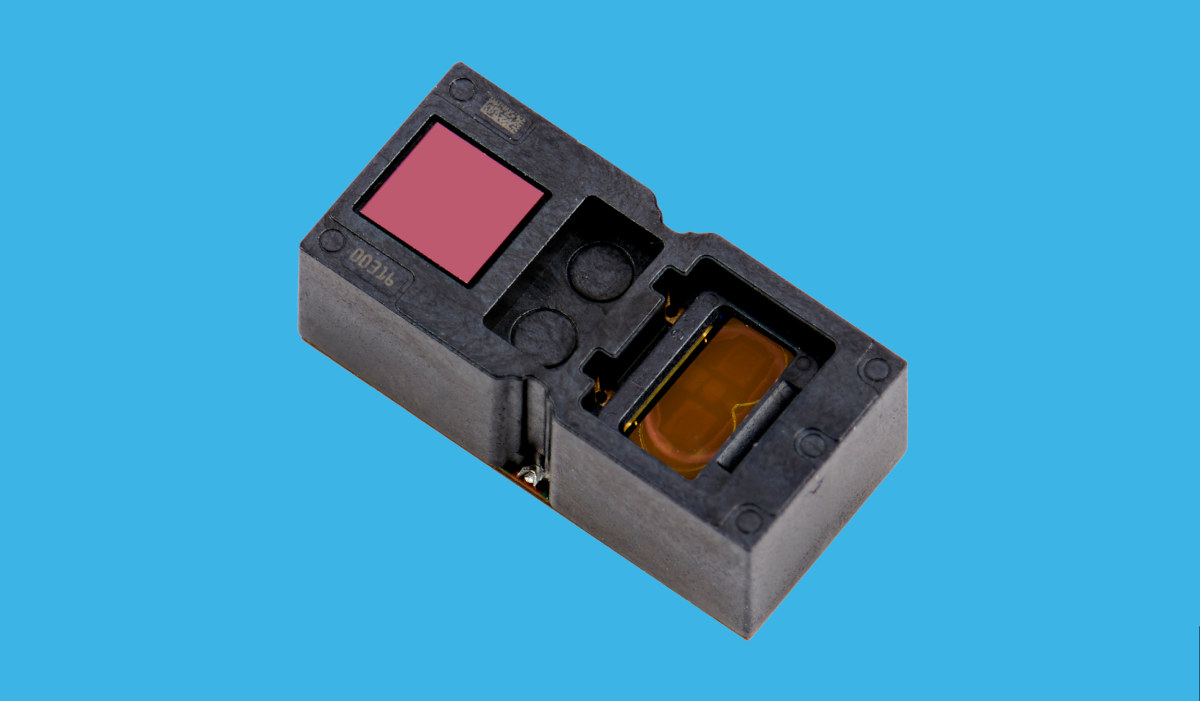
The STMicro VL53L9 sensor is the latest addition to the company’s FlightSense product family. The direct Time-of-Flight (ToF) 3D LIDAR (light detection and ranging) sensor offers a resolution of up to 2,300 zones. The module is described as all-in-one and easy to integrate. It comes in a small, reflowable package that contains all the necessary components for sensing objects and processing images. The sensor features an array of single photon avalanche diodes (SPADs) for photon detection, a post-processing SoC, and two vertical surface emitting lasers (VCSELs) powered by a dedicated bipolar-CMOS-DMOS (BCD) VCSEL. The VL53L9 is a multi-zone ToF sensor similar to the VL53L7CX and the VL53L8, meaning that it offers multi-zone distance measurements up to 54 x 42 zones with a wide 54° x 42° field-of-view. Unlike most IR sensors, the VL53L9 sensor uses backside illumination direct ToF technology to ensure absolute distance measurement, regardless of the target color […]
STMicro VL53L9 is a high-resolution, direct Time-of-Flight 3D LiDAR sensor module