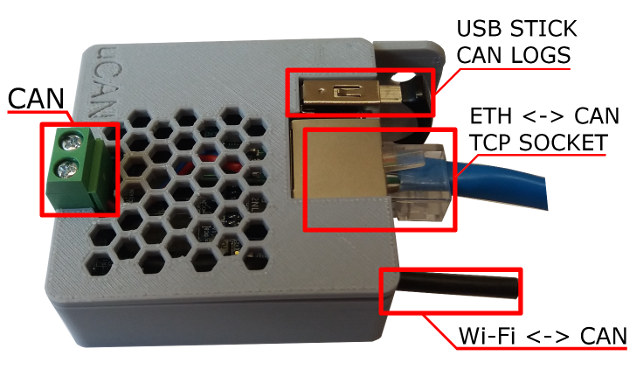
The CAN bus is a serial communication protocol used in automotive and automation applications. The guys at ucandevices.pl have designed a solution around Orange Pi Zero board that allows you to log CAN bus data or act as a bridge between the CAN bus and Ethernet or WiFi. They call it “CAN Ethernet converter, CAN Logger, Linux CAN computer”. Sorry, no shorter name that I could find… uCAN (pronounced micro CAN) CAN Bus board specifications: Main Board – Orange Pi Zero with Allwinner H2+ quad core cortex-A7 processor, 256 MB RAM Network Connectivity – 10/100M Ethernet, 802.11 b/g/n WiFi Can Bus – 2-pin terminal block; support for CAN version 2.0 support Power Supply – DC 5V/2A via micro USB port Dimension – 50 x 50 x 20 mm The device comes pre-load with Debian distribution provided by Armbian plus various CAN tools. The getting started video below shows uCANTools web […]
uCAN CAN Ethernet Converter and Logger is Based on Orange Pi Zero Board