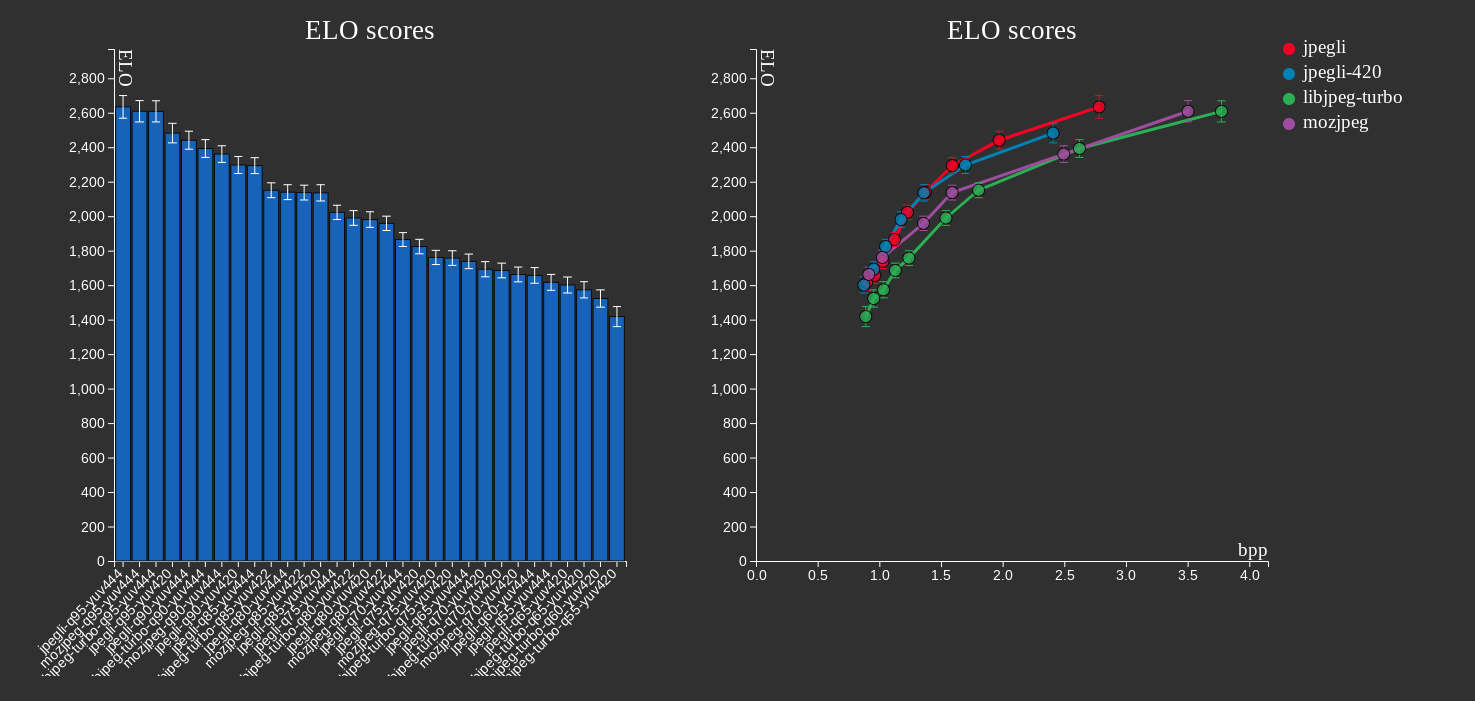
Google has released the Jpegli open-source library for advanced JPEG coding that maintains backward compatibility while delivering an up to 35% compression ratio improvement at high-quality compression settings. Google Research has been working on improving the compression of data (Brotli), audio (e.g. Lyra V2), and images with a project such as WebP for many years in order to speed up the web and make it consume less bandwidth for dollar savings and lower carbon emissions. Jpegli is their latest project and aims to improve the compression ratio of legacy JPEG files on systems were modern compression such as WebP may not be available or desirable. Jpegli highlights: Support both an encoder and decoder complying with the original JPEG standard (8-bit) and offering API/ABI compatibility with libjpeg-turbo and MozJPEG. Focus on high-quality results with up to 35% better compression ratio. Just as fast as libjpeg-turbo and MozJPEG. Support for 10+ bits […]
Google’s Jpegli open-source library can compress high quality images 35% more than traditional JPEG codecs