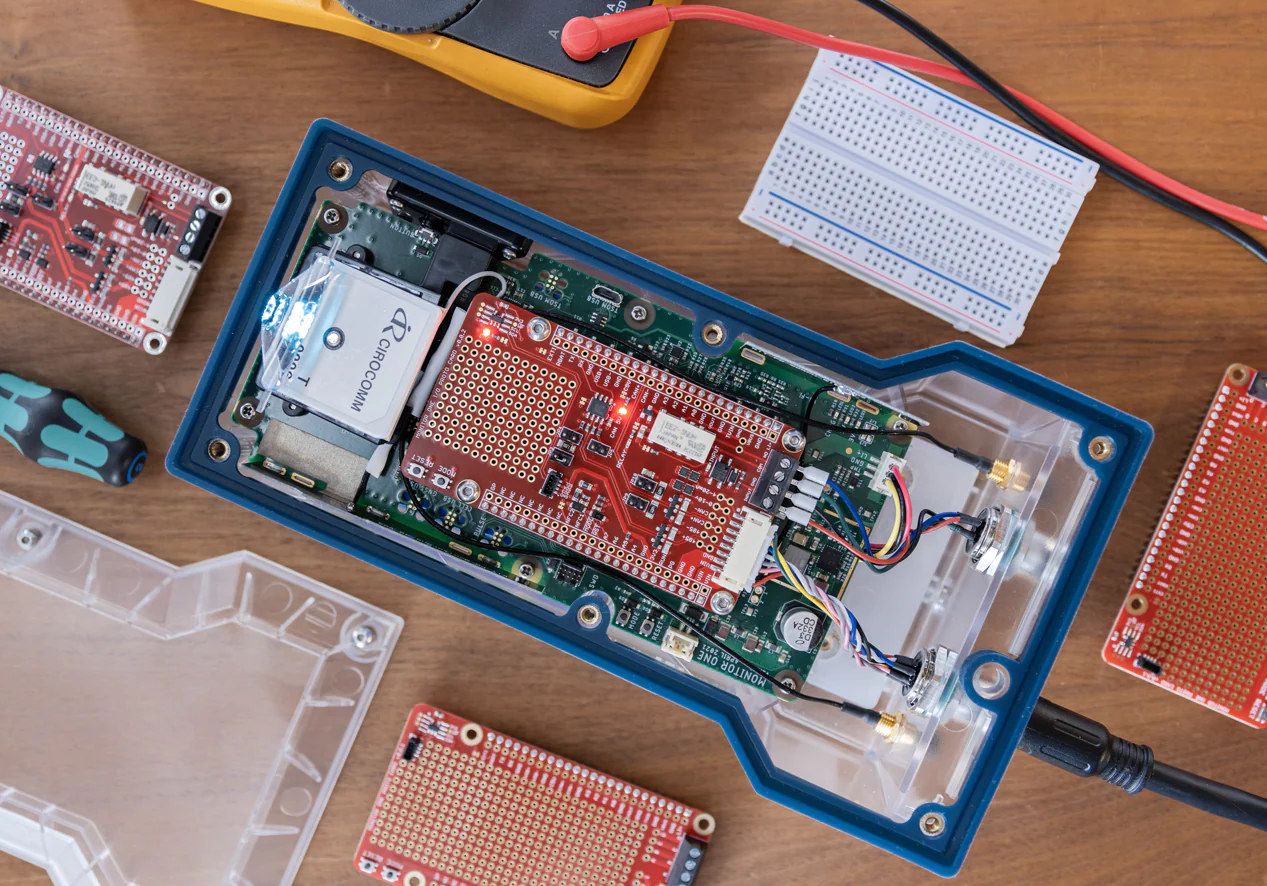
Particle’s Monitor One Developer Edition is a customizable cellular IoT gateway for monitoring industrial equipment packaged in an IP67 rugged enclosure with reference firmware, and suitable for rapid prototyping with support for a range of I/Os and sensors, and even a prototyping area for to solder your own circuitry. Like the company’s earlier Tracker One asset tracker, the Monitor One is based on the Tracker SoM with a Nordic Semi nRF52840 Arm Cortex-M4 wireless SoC for Bluetooth connectivity, a Quectel LTE Cat M1 (North America) or Cat 1 with 3G and 2G fallback (EMEA), u-blox Neo-M8U GNSS module, and an ESP32 for WiFi location support. The new customizable cellular IoT gateway still integrates with the Particle IoT PaaS (Platform as a Service), and the company also provides developer tools. The Monitor One Developer Edition is comprised of the following items: Monitor One base model fitted with a Particle Tracker SoM […]
Monitor One – A customizable cellular IoT gateway for industrial equipment monitoring