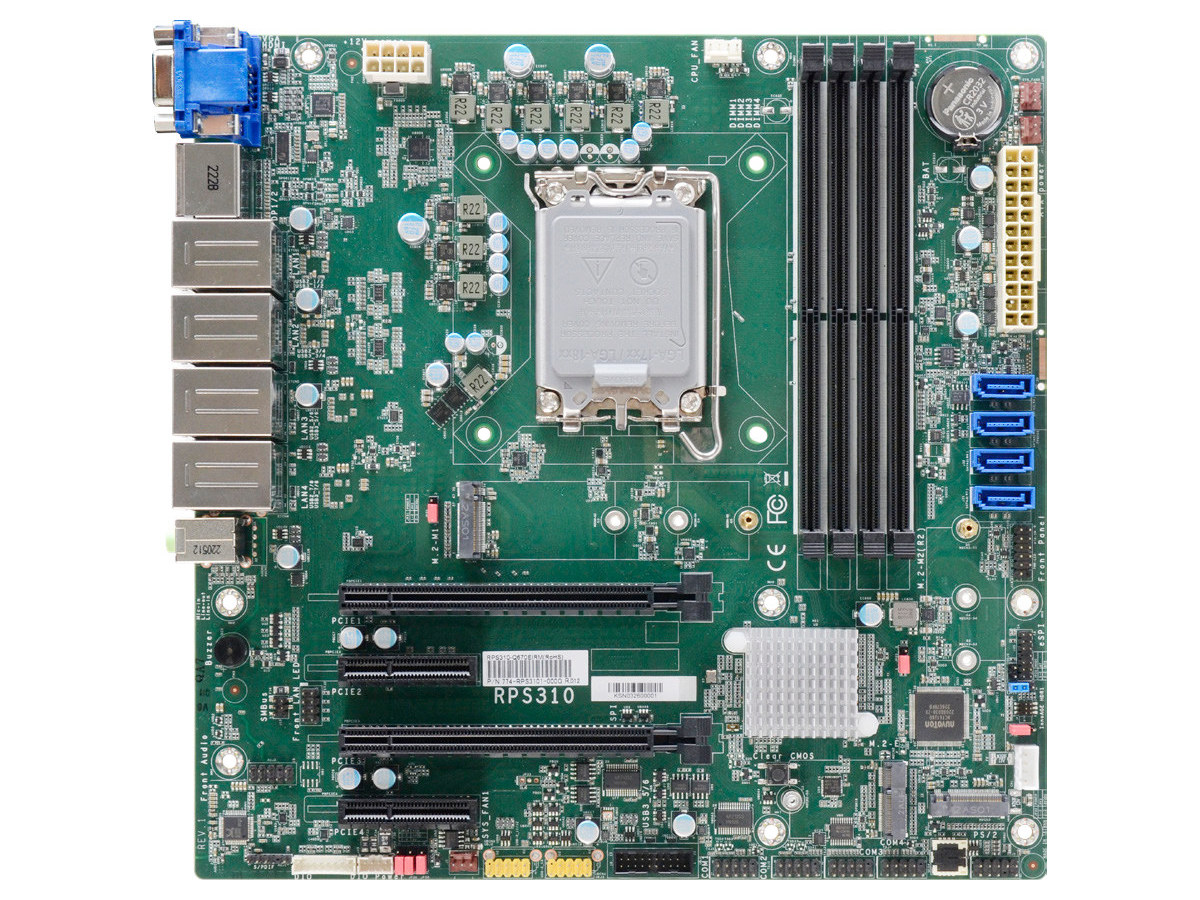
DFI has recently unveiled two new Industrial MicroATX Motherboards, the RPS310 and ADS310, that claim to have support for Core 12th Gen (Alder Lake-S), 13th Gen (Raptor Lake-S), and 14th Gen (Raptor Lake-S Refresh) processors. The motherboards can be built around R680E or Q670E chipset and support a range of peripherals including VGA, DP++, HDMI, PCIe, M.2 M key, SATA3.0, and much more. The key difference between the two is that the RPS310 supports DDR5 memory, features 4x Intel 2.5GbE network connections, and has a 10-year CPU lifecycle with optional 5-year extended support. In contrast, the ADS310 supports DDR4 memory, features 2x Intel 10GbE + 2x Intel 2.5GbE network connections, and boasts a longer 15-year CPU lifecycle support. We’ve previously covered motherboards with a similar form factor, including the HiFive Pro P550 and Milk-V Pioneer, both powered by RISC-V CPUs. If you’re interested in alternative architectures, you might also enjoy […]
Industrial MicroATX motherboards support Intel Core 12th-14th Gen processors with up to four 2.5GbE/10GbE ports