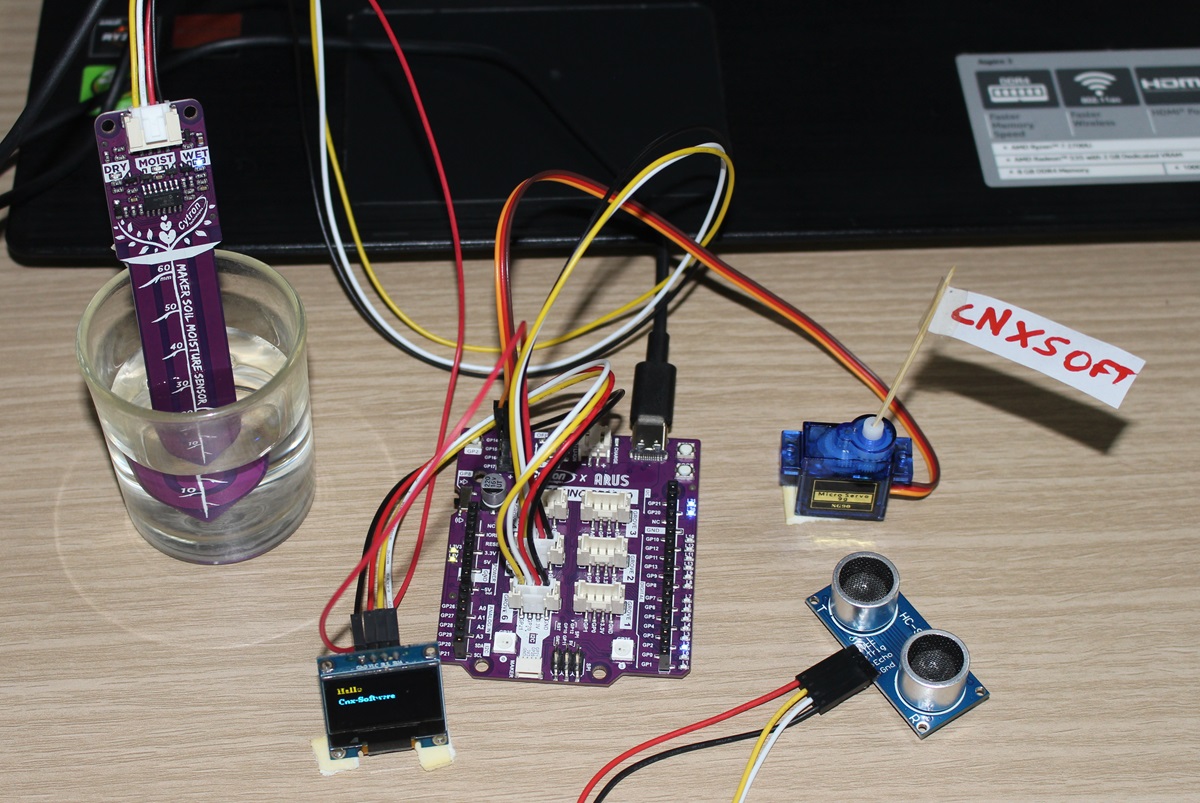
Today, We will review the Cytron Maker Uno RP2040 development board combining the Arduino UNO form factor with the Raspberry Pi RP2040 microcontroller that makes it programmable with the Arduino IDE (C/C++), Micropython, or CircuitPython. The board is suitable for both beginners and advanced users with a convenient port layout that includes a “Maker” connector plus six Grove connectors for sensor modules and a header for four servos besides the Arduino UNO headers. The board offers two power options: USB (5V) via the USB-C connector or a single-cell LiPo/Li-Ion battery via the LiPo connector. Cytron Maker Uno RP2040 specifications SoC – Raspberry Pi RP2040 dual-core Arm Cortex-M0+ processor @ up to 133 MHz with 264 KB SRAM Storage – 2MB flash USB – USB-C port for power and programming Expansion Arduino UNO headers for shields 6x Grove Ports (Digital I/O, PWM Output, UART, I2C, Analog Input) 1x Maker port compatible […]
Maker Uno RP2040 review with Arduino IDE using micro servo, soil moisture sensor, ultrasonic sensor, and I2C OLED modules