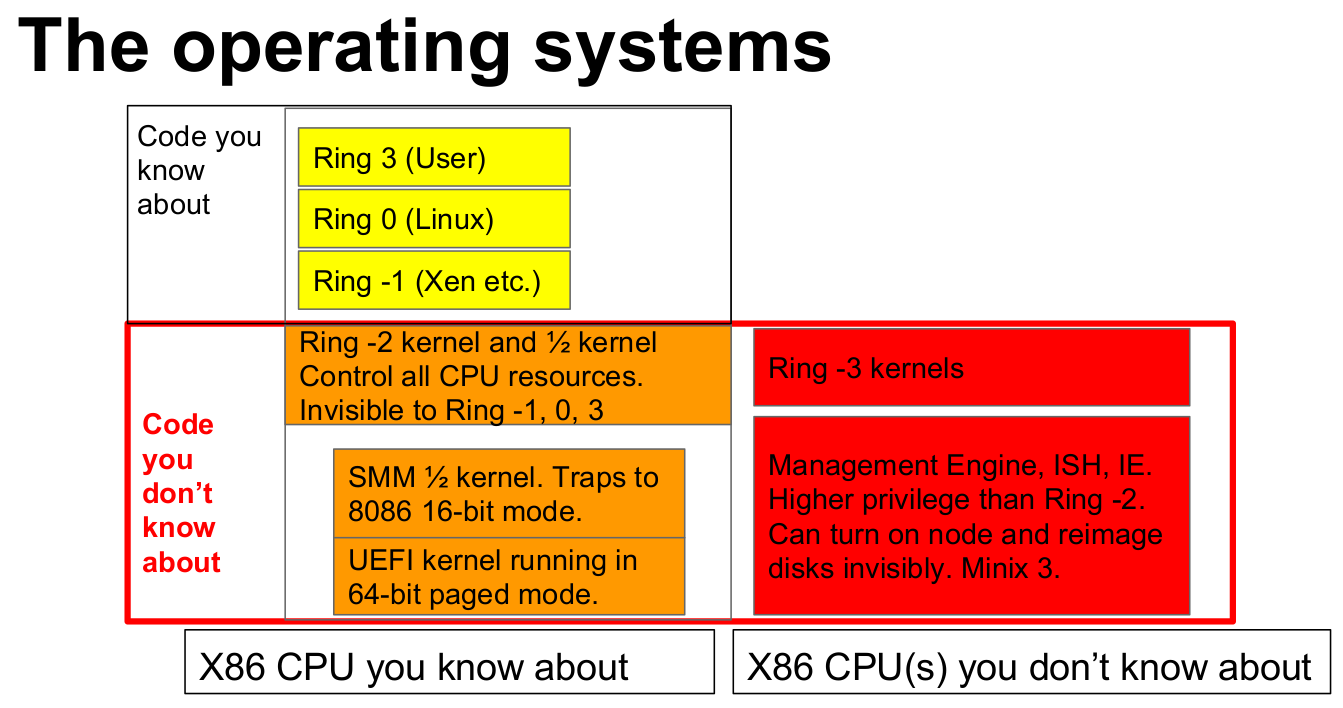
You may have heard a few things about Intel Management Engine in recent months, especially as security issues have been found, the firmware is not easily upgradeable, and the EFF deemed it a security hazard asking Intel for ways to disable it. In recent days, I’ve seen several media reports about the Management Engine being based on an Intel Quark x86-based 32-bit CPU running MINIX open-source operating system. Keep in mind, there’s nothing nefarious about MINIX, it’s just that Intel keeps its own developments on top closed. One of sources for the information is a blog post explaining how to disable Intel ME 11, but ZDNET also points to one of the talks at the Embedded Linux Conference Europe 2017 entitled “Replace Your Exploit-Ridden Firmware with Linux” by Ronald Minnich, Google which explains the problem, and proposes a solution to (almost) disable Intel’s ME, and replace UEFI by a small […]
MINIX based Intel Management Engine Firmware & UEFI are Closed Source & Insecure, NERF to the Rescue!