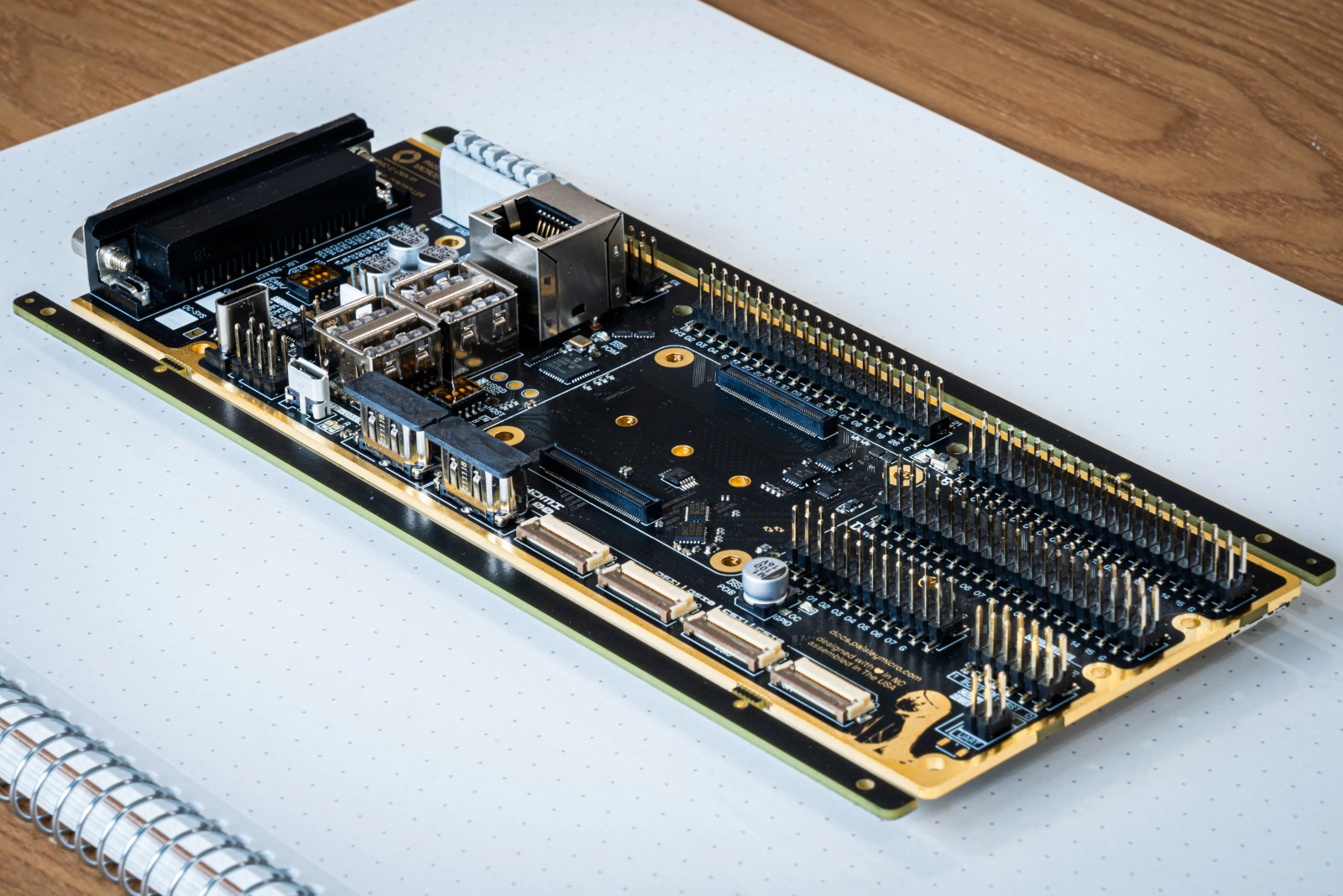
Paisley Microsystems PMC-C-CMX is a DIN-Rail mountable industrial control board taking a Raspberry Pi CM4 or CM5 (once launched), equipped with an STM32H7 Arm Cortex-M7 microcontroller for real-time control. The carrier board integrates features such as wide voltage input (7 to 55V DC), an M.2 PCIe Gen 3 Key-B and Key-M sockets with cellular option, gigabit Ethernet, HDMI and MIPI DSI display interfaces, twp MIPI CSI camera interfaces, and several headers and connectors with RS485, GPIO, I2S, SPI, and more connected to either the Raspberry Pi Compute Module or the STM32H7 MCU. Paisley Microsystems PMC-C-CMX specifications: Supported system-on-modules – Raspberry Pi CM4 or upcoming Raspberry Pi CM5 MCU – STMicro STM32H7B0 Arm Cortex-M7 microcontroller up to 280 MHz with 128KB flash, 1.4MB SRAM MCU <-> CM communication – UART and/or SPI Video Output 2x HDMI ports up to 4Kp60 2x MIPI DSI connectors Camera input – 2x MIPI CSI connectors […]
Industrial control board combines Raspberry Pi CM4/CM5 with STM32H7 MCU for real-time control