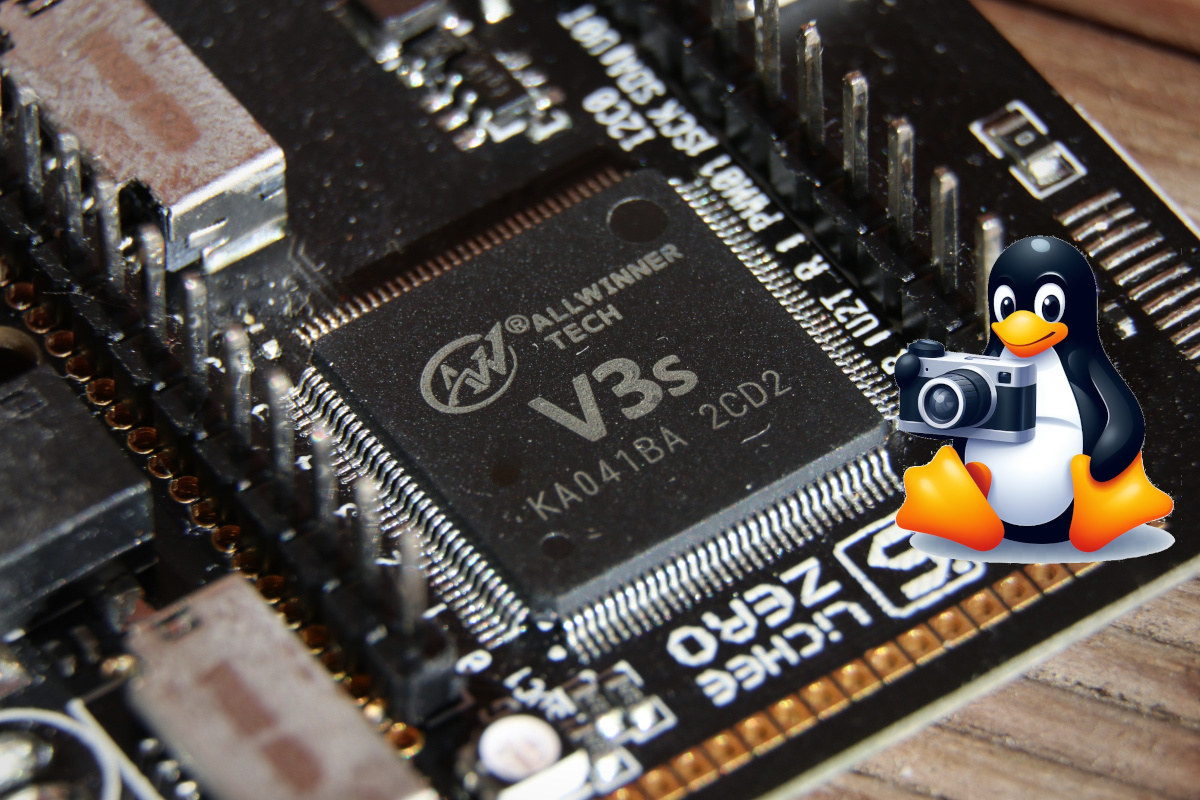
Unrelated to tinyVision.ai, the TinyVision development board is a computer vision board from Chinese developer YuzukiTsuru powered by either the Allwinner V851S or the V851S3 and is billed as an “ultimate all-in-one solution for Linux motherboards, IPCs, servers, routers, and more.” It packs features such as a Cortex-A7 core running at 1200MHz, a 2-channel MIPI CSI input, and an independent image signal processor (ISP) capable of a maximum resolution of 2560 x 1440 in a compact form factor. TinyVision specifications: Processor – Allwinner V851SE / V851s3 with Cortex-A7 core @ 1200MHz and RISC-V E907GC core @ 600MHz NPU: 0.5TOPS (tera operations per second) @ INT8 precision Memory – 64MB DDR2 (V851se), 128MB DDR3L (V851s3) Storage – MicroSD card slot (supports UHS-SDR104), onboard SD NAND via SPI Display – 2-lane MIPI DSI (1280 x 720 @ 60fps), RGB LCD (320 x 240 @ 60fps) Video Input ISP with a maximum resolution […]
TinyVision is a compact Allwinner V851S/V851S3-powered Linux board for vision-based applications