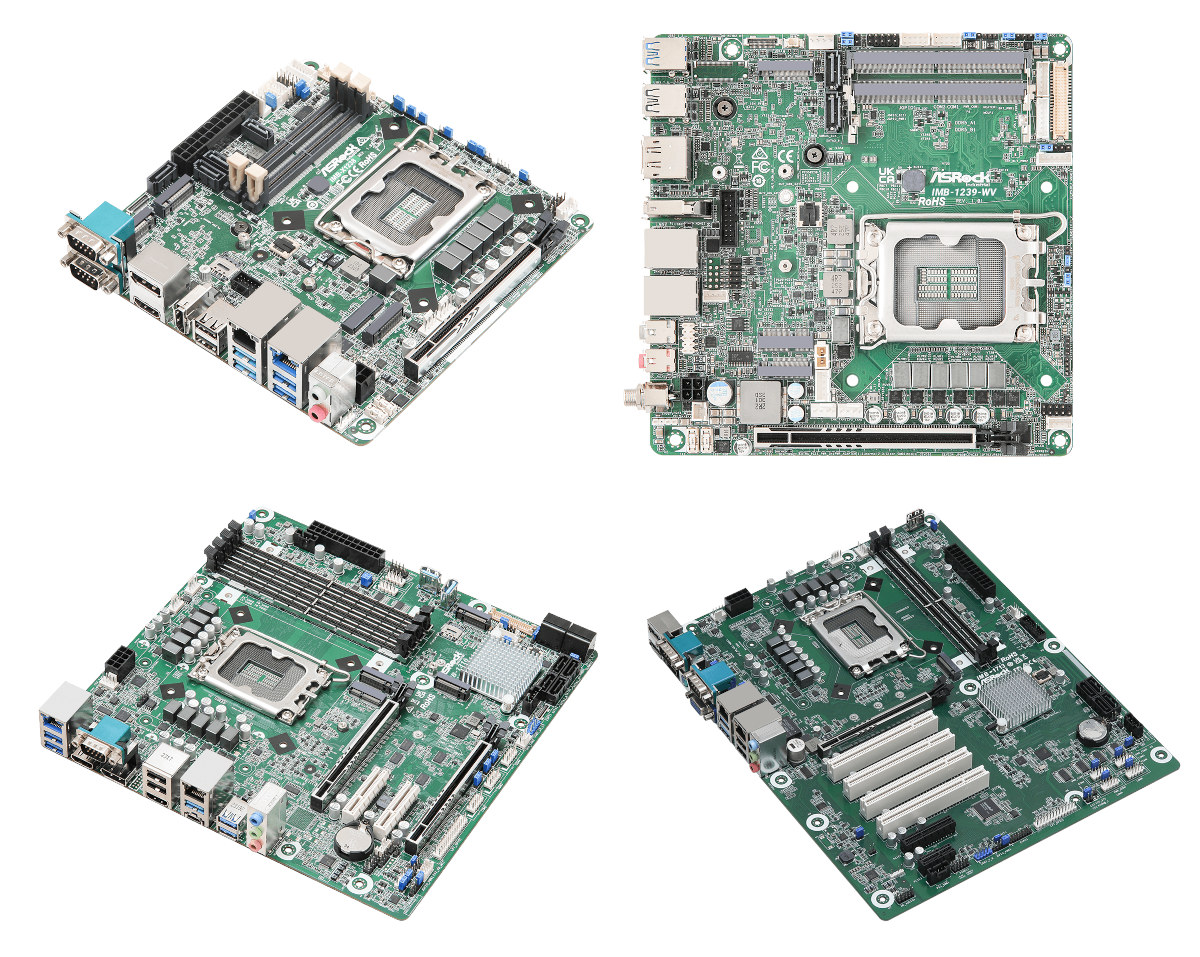
ASRock Industrial has just announced 25 (twenty-five!) industrial motherboards powered by 14th gen Intel Core Raptor Lake-S Refresh hybrid processors with up to 24 cores and 32 threads introduced last October, and supporting up to 96GB DDR5 4800/5600 memory. The thin and high-rise mini-ITX, micro-ATX, and ATX industrial motherboards support up to four 4K displays, PCIe Gen5 interfaces, up to three 2.5GbE ports (and 10GbE LAN for the IMB-X1316-10G model), and USB 3.2 Gen2x2 (20 Gbps) ports for factory automation, robotics, machine vision, smart retail, kiosks, digital signage, gaming, security, and more. I would usually list the specifications of the motherboards, but since we have 25 different models, I’ll skip that and provide a summary. One reason ASRock Industrial has so many models is that those are existing motherboards with socketed processors and the company offered 12th and 13th gen CPUs so far, and the company simply updated the BIOS […]
ASRock Industrial upgrades mini-ITX, micro-ATX, and ATX motherboards for Intel Core 14th Gen Raptor Lake-S Refresh processors