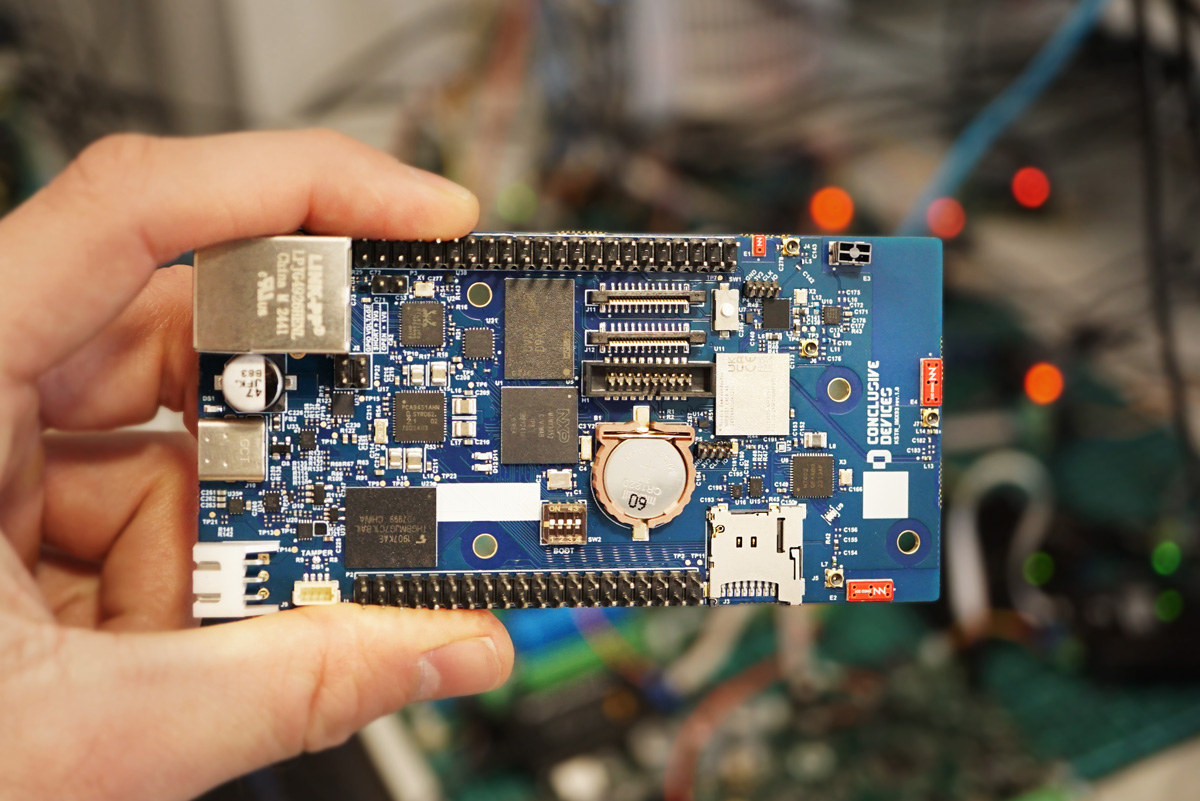
Conclusive Engineering KSTR-IMX93 is a single board computer (SBC) powered by an NXP i.MX 93 Cortex-A55/M33 AI SoC and equipped with three Nordic Semi wireless solutions, namely nRF5340 SoC, nRF9151 SiP, and nRF7002 WiFi 6 coprocessor. This allows the board to offer a wide range of wireless and wired connectivity options with Gigabit Ethernet, dual-band WiFi 6, Bluetooth 5.4 LE, Zigbee, Thread, NB-IoT, LTE Cat-M1, and GNSS. In some way, the KSTR-IMX93 is the equivalent of combining a Nordic Thingy:91 X Cellular IoT development platform with an Arm Linux SBC. KSTR-IMX93 specifications: SoC – NXP i.MX 93 CPU Single or dual-core Arm Cortex-A55 up to 1.7 GHz Arm Cortex-M33 up to 250 MHz GPU – PXP 2D GPU with blending/composition, resize, color space conversion NPU – Arm Ethos-U65 NPU @ 1 GHz up to 0.5 TOPS Memory – 640 KB OCRAM w/ ECC Security – EdgeLock Secure Enclave System Memory […]
KSTR-IMX93 single board computer pairs NXP i.MX 93 SoC with Nordic Semi nRF5340, nRF9151, and nRF7002 wireless chips