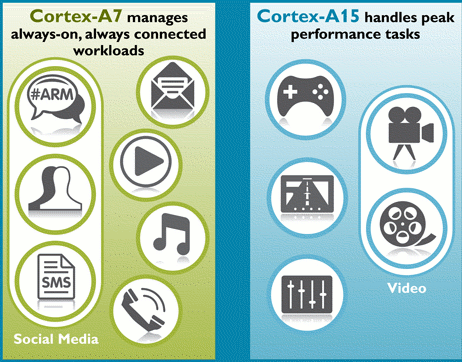
ARM unveiled the Cortex A7, a new core with higher performance than the Cortex A8 (1.5x) and with 5 times less power consumption. It will be used in conjunction with Cortex-A15 Core and allows big.LITTLE processing where the Cortex A7 (companion core) takes care of the low performance, low power tasks (social network, email, SMS, phone calls) and the Cortex A15 kicks in for high performance tasks such as video processing and gaming. Here’s an excerpt of the Cortex A7 / big.LITTLE processing press release: ARM today announced the ARM® Cortex™-A7 MPCore™ processor – the most energy-efficient application class processor ARM has ever developed, and big.LITTLE processing – a flexible approach that redefines the traditional power and performance relationship. The Cortex-A7 processor builds on the low-power leadership established by the Cortex-A8 processor that is at the heart of many of today’s most popular smartphones. A single Cortex-A7 processor delivers 5x […]
ARM Unveils Cortex-A7 and big.LITTLE processing