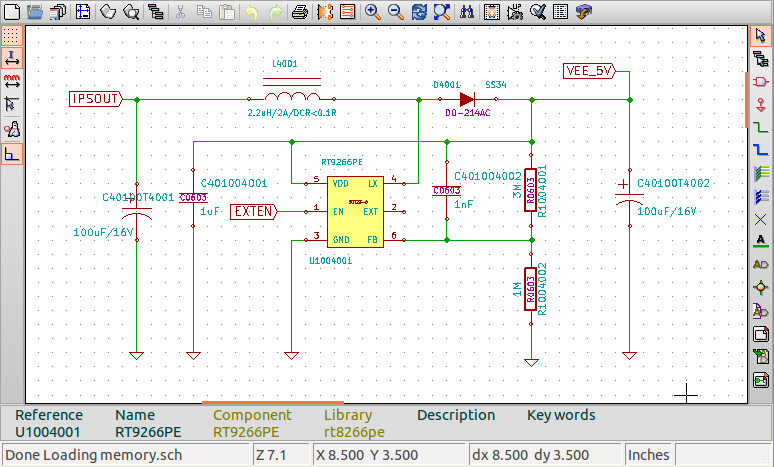
Most schematics capture and PCB layout software run on Windows and are closed source. But if your favorite OS is Linux, there are a few open source software including Kicad and gEDA. There is also Cadsoft Eagle which can be installed in Linux with a free license for hobbyists and educational purposes, but is not open source. Today, I’ll focus on Kicad. I don’t really capture schematics, let alone layout PCBs, but I sometimes need to use this type of software to locate pins/components on the schematics and PCB and check some parts of the schematics that can affect software. So I will mainly give an overview of Kicad and write my experience trying to import another project (Beagleboard XM) to Kicad. If you want to learn how to get started with your own project with Kicad, you might want to have a look at Teho Labs Kicad Tutorial. In […]
Schematics Capture and PCB Layout in Linux with Kicad