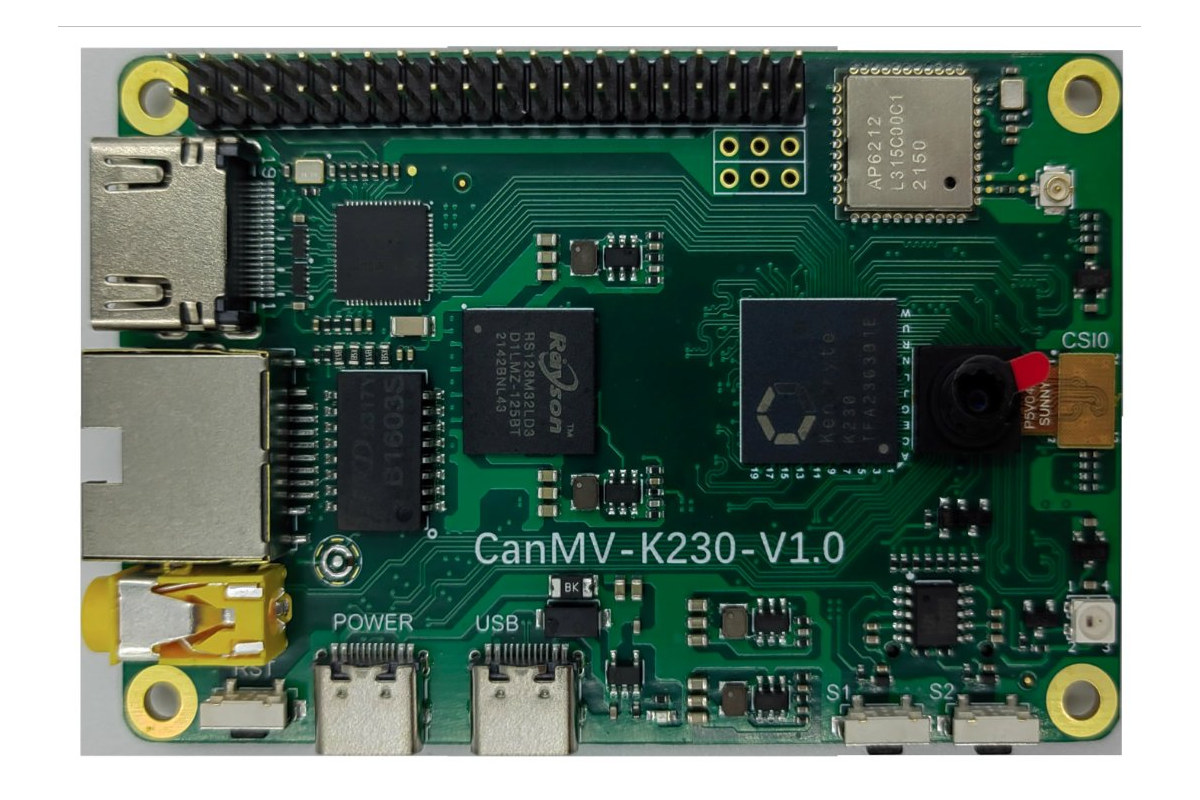
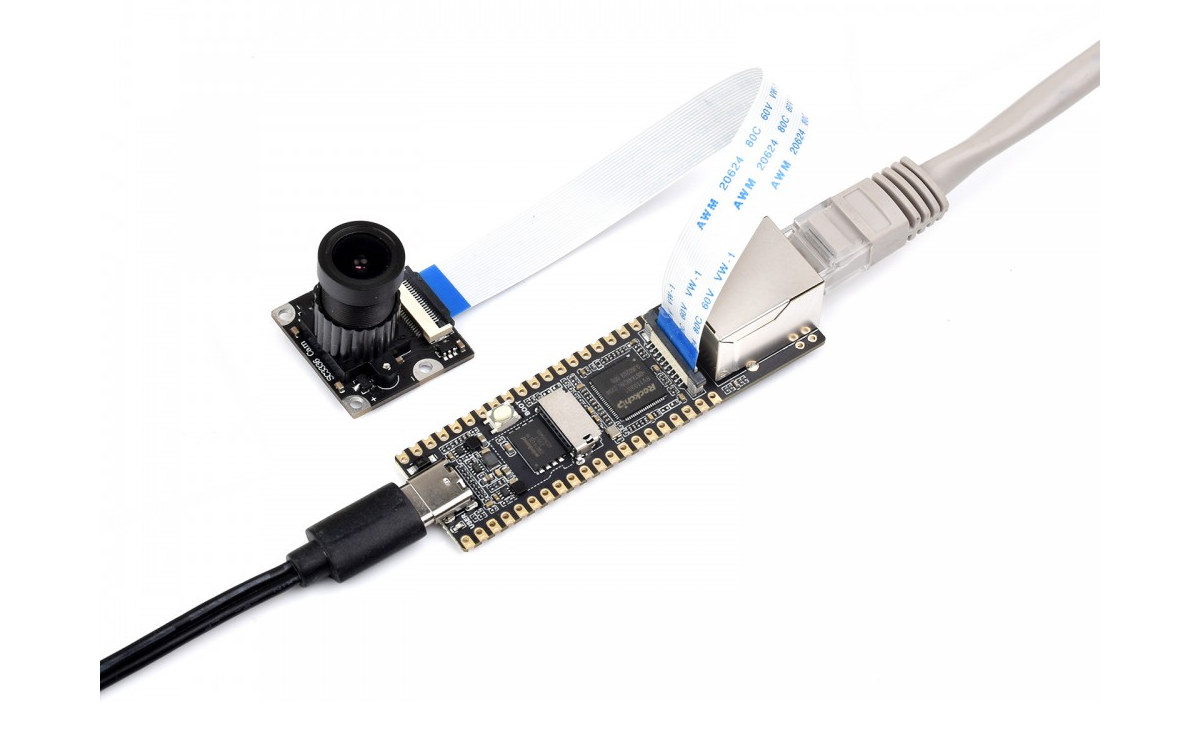
CanMV-K230 is a credit card-sized development board for AI and computer vision applications based on the Kendryte K230 dual-core C908 64-bit RISC-V processor with built-in KPU (Knowledge Process Unit) and various interfaces such as MIPI CSI inputs and Ethernet. The first Kendryte RISC-V AI processor was launched in 2018 with the K210 which I tested with the Grove AI HAT and Maixduino board and found fun to experiment with, but noted that performance was limited. Since then the company introduced the K510 mid-range AI processor with a more powerful 3 TOPS AI accelerator, and the K230 entry-level successor to the K210 – which was planned for 2022 in a 2021 roadmap – has now just been launched and integrated into the CanMV-K230 development board. CanMV-K230 specifications: SoC – Kendryte K230 CPU 64-bit RISC-V processor @ 1.6GHz with RISC-V Vector Extension 1.0, FPU 64-bit RISC-V processor @ 800MHz with support for […]
CanMV-K230 AI development board features Kendryte K230 dual-core 64-bit RISC-V processor