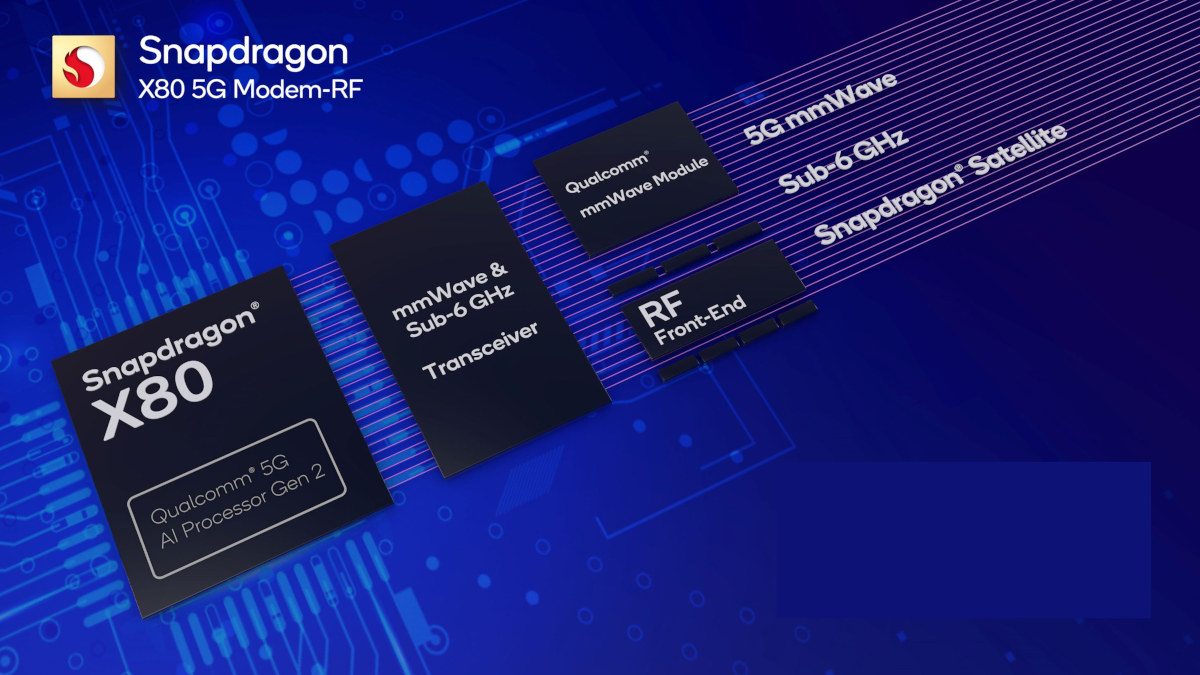
Mobile World Congress 2024 (MWC 2024) has just started, and Qualcomm had three major announcements with the introduction of the Snapdragon X80 5G modem with NB-NTN satellite connectivity, the Qualcomm AI Hub with over 75 AI models optimized for Snapdragon processors, and the FastConnect 7900 WiFi 7, Bluetooth, and Ultra Wideband (UWB) chip. Snapdragon X80 5G modem-RF system Snapdragon X80 5G modem specifications: Peak download speed – 10 Gbps Peak upload speed – 3.5 Gbps Cellular Modem-RF Specs – 10CC aggregation in mmWave, 5CC aggregation in 5G sub-6GHz Cellular Technology 5G NR, sub-6 GHz Dynamic Spectrum Sharing (DSS) LTE, WCDMA, LAA, TD-SCDMA, GSM/EDGE, CBRS mmWave, sub-6 carrier aggregation (FDD-FDD) sub-6 carrier aggregation (TDD-TDD), 5G FDD, 5G TDD, sub-6 carrier aggregation (FDD-TDD) 5G SA (standalone), 5G NSA (non-standalone) F + F ULCA, FDD UL MIMO, Switched Uplink, 3GPP R18-ready (5G Advanced-ready), 6x CA sub-6 downlink carrier aggregation, 1024-QAM sub-6, FR1 + […]
Qualcomm unveils Snapdragon X80 5G modem with NB-NTN satellite connectivity, AI Hub, and FastConnect 7900 WiFi 7 chip