**
* Copyright (C) 2009, 2010 SC 4ViewSoft SRL
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*/
package org.achartengine.chartdemo.demo.chart;
import org.achartengine.ChartFactory;
import org.achartengine.chart.BarChart.Type;
import org.achartengine.model.RangeCategorySeries;
import org.achartengine.model.XYMultipleSeriesDataset;
import org.achartengine.renderer.SimpleSeriesRenderer;
import org.achartengine.renderer.XYMultipleSeriesRenderer;
import android.content.Context;
import android.content.Intent;
import android.graphics.Color;
import android.graphics.Paint.Align;
/**
* Temperature demo range chart.
*/
public class TemperatureChart extends AbstractDemoChart {
/**
* Returns the chart name.
*
* @return the chart name
*/
public String getName() {
return "Temperature range chart";
}
/**
* Returns the chart description.
*
* @return the chart description
*/
public String getDesc() {
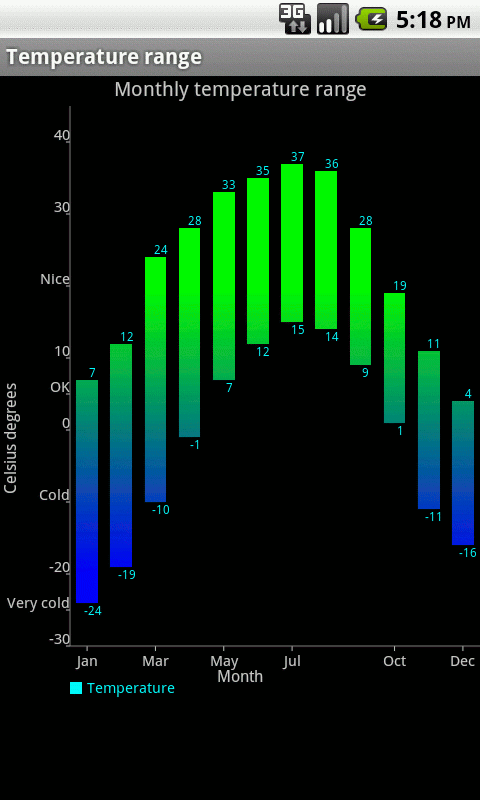
return "The monthly temperature (vertical range chart)";
}
/**
* Executes the chart demo.
*
* @param context the context
* @return the built intent
*/
public Intent execute(Context context) {
double[] minValues = new double[] { -24, -19, -10, -1, 7, 12, 15, 14, 9, 1, -11, -16 };
double[] maxValues = new double[] { 7, 12, 24, 28, 33, 35, 37, 36, 28, 19, 11, 4 };
XYMultipleSeriesDataset dataset = new XYMultipleSeriesDataset();
RangeCategorySeries series = new RangeCategorySeries("Temperature");
int length = minValues.length;
for (int k = 0; k < length; k++) {
series.add(minValues[k], maxValues[k]);
}
dataset.addSeries(series.toXYSeries());
int[] colors = new int[] { Color.CYAN };
XYMultipleSeriesRenderer renderer = buildBarRenderer(colors);
setChartSettings(renderer, "Monthly temperature range", "Month", "Celsius degrees", 0.5, 12.5,
-30, 45, Color.GRAY, Color.LTGRAY);
renderer.setBarSpacing(0.5);
renderer.setXLabels(0);
renderer.setYLabels(10);
renderer.addXTextLabel(1, "Jan");
renderer.addXTextLabel(3, "Mar");
renderer.addXTextLabel(5, "May");
renderer.addXTextLabel(7, "Jul");
renderer.addXTextLabel(10, "Oct");
renderer.addXTextLabel(12, "Dec");
renderer.addYTextLabel(-25, "Very cold");
renderer.addYTextLabel(-15, "Cold");
renderer.addYTextLabel(-5, "Quite cold");
renderer.addYTextLabel(5, "OK");
renderer.addYTextLabel(15, "Decent");
renderer.addYTextLabel(25, "Warm");
renderer.setMargins(new int[] {30, 70, 10, 0});
renderer.setYLabelsAlign(Align.RIGHT);
SimpleSeriesRenderer r = renderer.getSeriesRendererAt(0);
r.setDisplayChartValues(true);
r.setChartValuesTextSize(12);
r.setChartValuesSpacing(3);
r.setGradientEnabled(true);
r.setGradientStart(-20, Color.BLUE);
r.setGradientStop(20, Color.GREEN);
return ChartFactory.getRangeBarChartIntent(context, dataset, renderer, Type.DEFAULT,
"Temperature range");
}
}