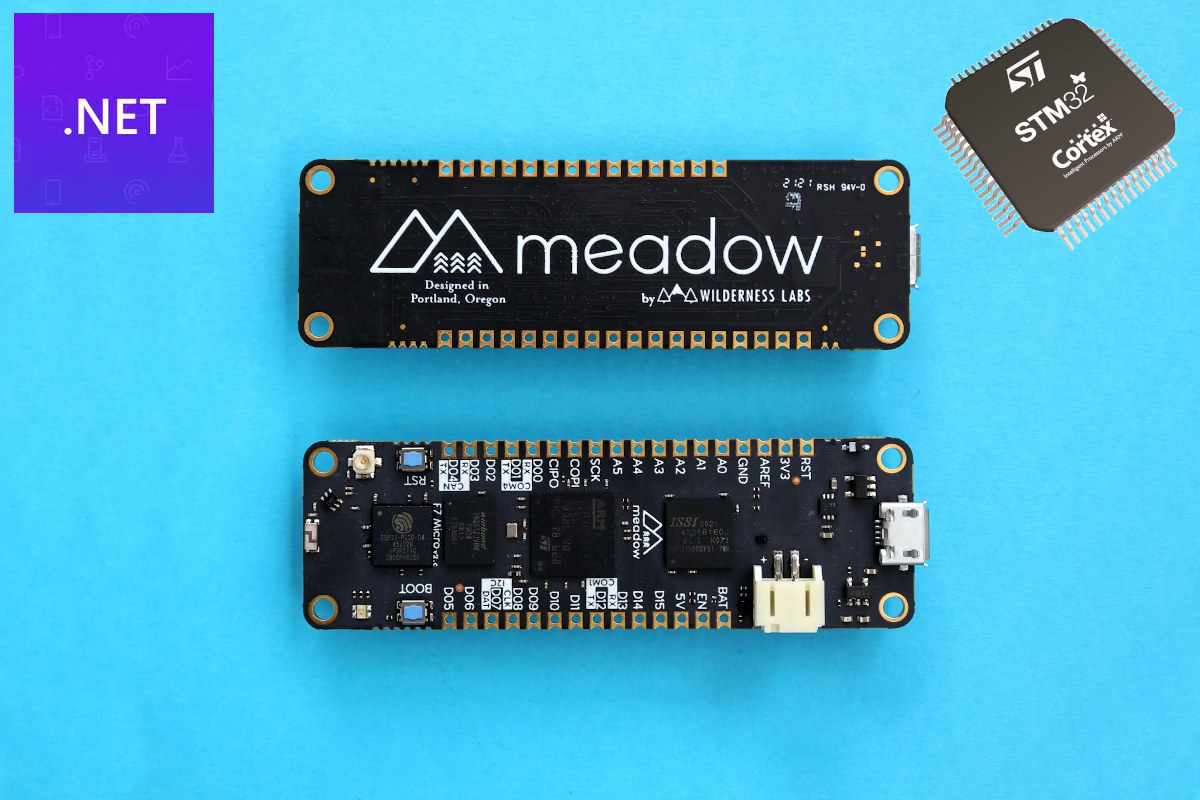
Wilderness Labs Meadow F7v2 Feather is an STM32F7 Arm Cortex-M7 development board following the Adafruit Feather form factor and programmable with C# through a lightweight implementation of the .NET framework. We had previously seen the .NET Framework running on Android and Linux thanks to Xamarin’s Mono, but I don’t think I had ever a microcontroller-class board supporting the .NET framework and C# programming. But that’s exactly what the Meadow F7v2 Feather does. Meadow F7v2 Feather specifications: MCU – STMicro STM32F7 Arm Cortex-M7 microcontroller @ 216 MHz with 2D graphics and JPEG accelerators Memory – 32MB RAM Storage – 64MB flash Connectivity – 2.4 GHz WiFi and BLE (ESP32) with onboard and external u.FL antennas USB – 1x Micro USB port for power and programming Expansion with through and castellated holes with up to 25x GPIO, 12x PWM, 6x analog inputs, 2x DAC, I2C, I2S input/output, SPI, UART, CAN Bus Misc […]
Meadow F7v2 Feather STM32F7 MCU board supports .NET, C# programing