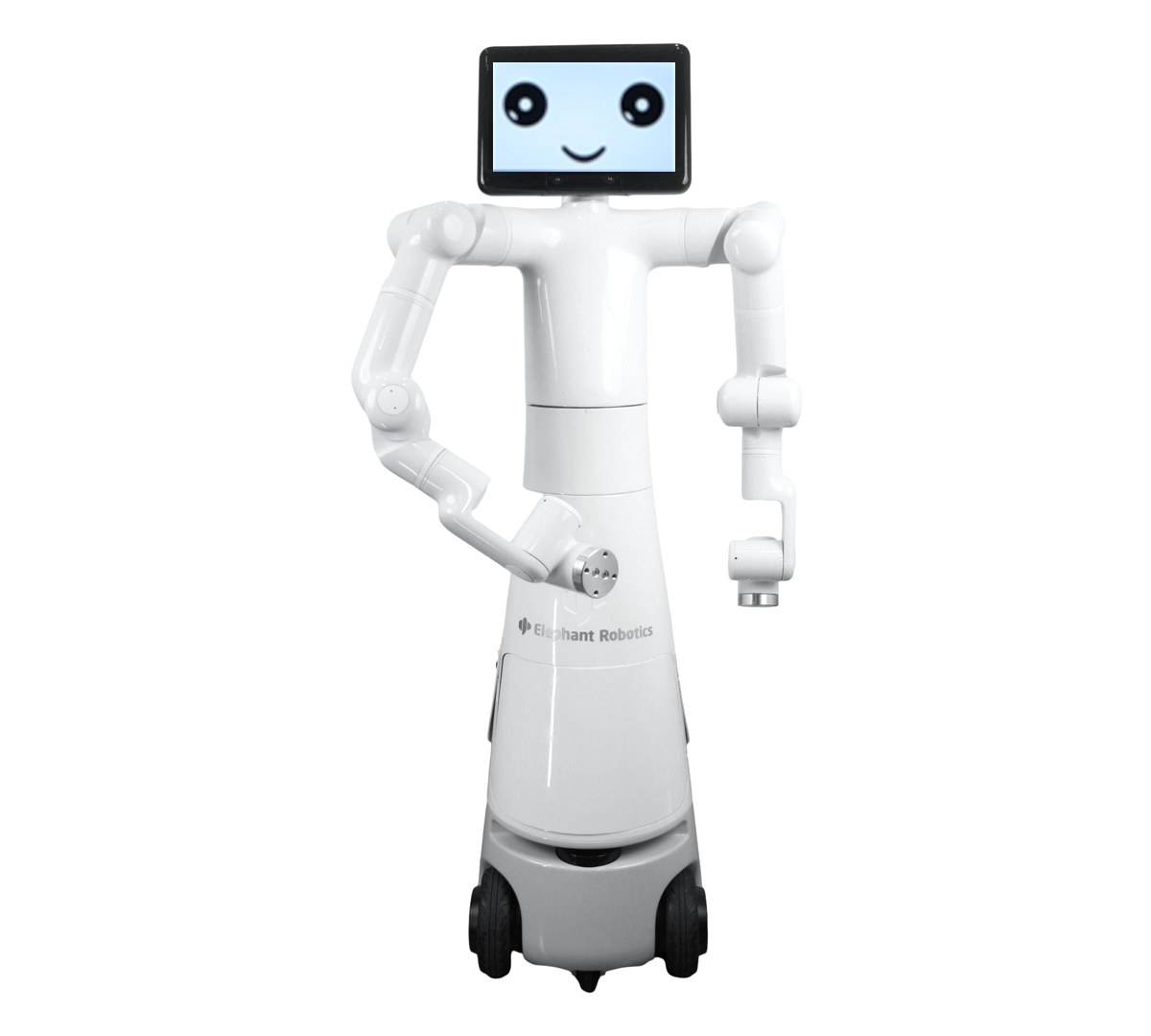
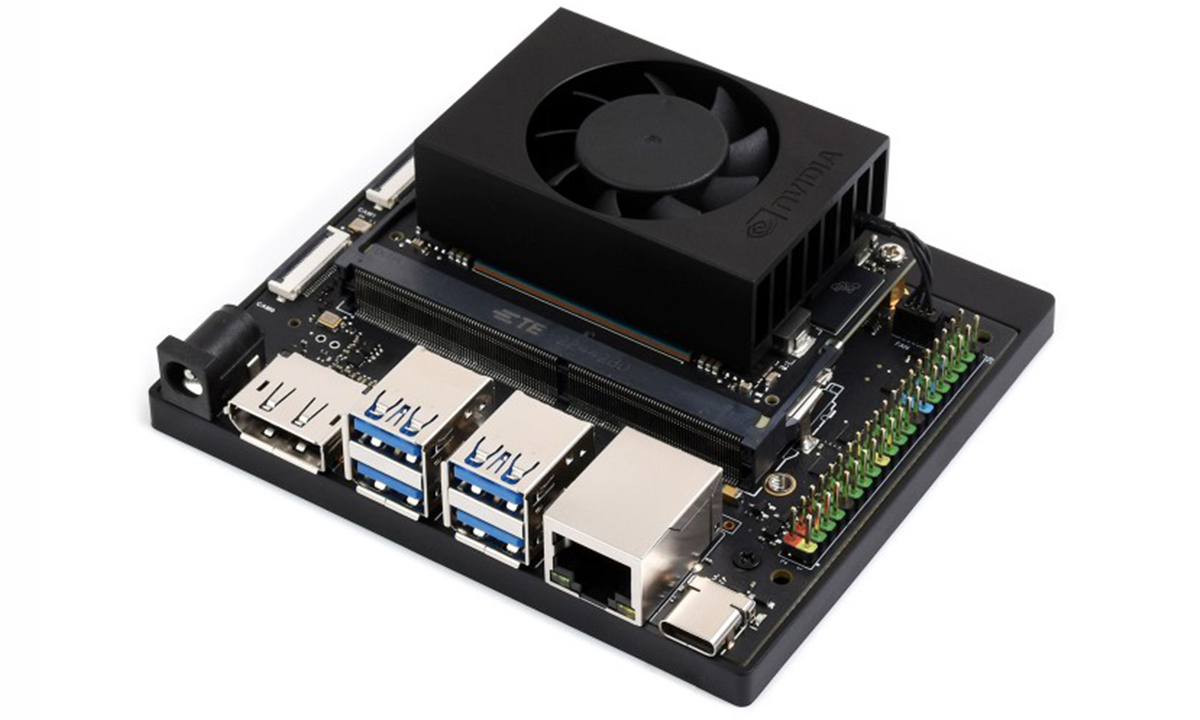
Elephant Robotics Mercury X1 is a 1.2-meter high wheeled humanoid robot with two robotic arms using an NVIDIA Jetson Xavier NX as its main controller and ESP32 microcontrollers for motor control and suitable for research, education, service, entertainment, and remote operation. The robot offers 19 degrees of freedom, can lift payloads of up to 1kg, work up to 8 hours on a charge, and travel at up to 1.2m/s or about 4.3km/h. It’s based on the company’s Mercury B1 dual-arm robot and a high-performance mobile base. Mercury X1 specifications: Main controller – NVIDIA Jetson Xavier NX CPU – 6-core NVIDIA Carmel ARM v8.2 64-bit CPU with 6MB L2 + 4MB L3 caches GPU – 384-core NVIDIA Volta GPU with 48 Tensor Cores AI accelerators – 2x NVDLA deep learning accelerators delivering up to 21 TOPS at 15 Watts System Memory – 8 GB 128-bit LPDDR4x @ 51.2GB/s Storage – 16 […]
Mercury X1 wheeled humanoid robot combines NVIDIA Jetson Xavier NX AI controller and ESP32 motor control boards