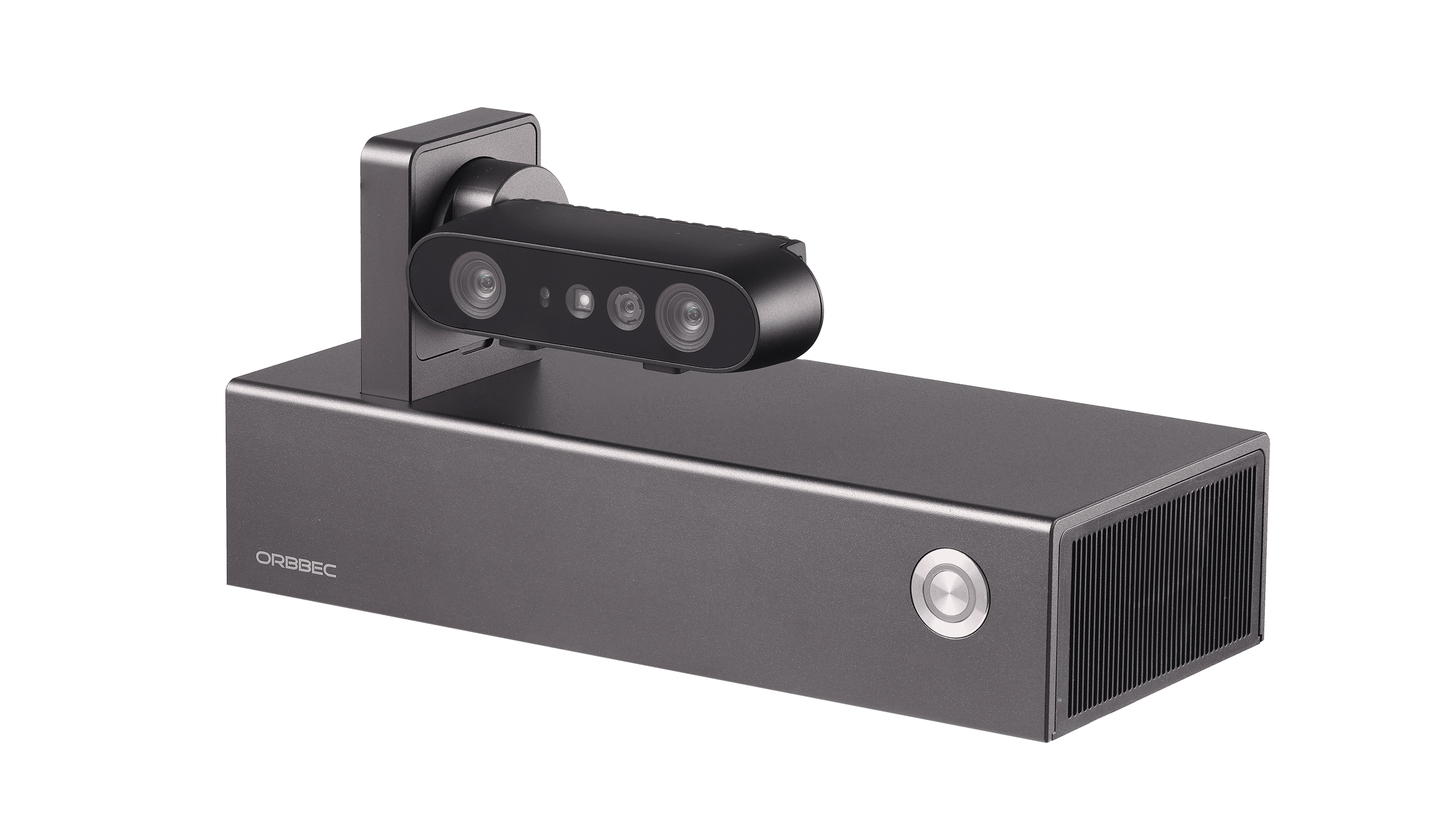
The second prize of Giveaway Week 2024 is the Orbbec Femto Mega 3D depth and 4K RGB camera powered by an NVIDIA Jetson Nano module and featuring Microsoft ToF technology found in Hololens and Azure Kinect DevKit. The camera connects to Windows or Linux host computers through USB or Ethernet and is supported by the Orbbec SDK with the NVIDIA Jetson Nano running depth vision algorithms to convert raw data to precise depth images. I first reviewed the Orbbec Femto Mega using the Orbbec Viewer for a quick test connected to an Ubuntu laptop (as shown above) before switching to a more complex demo using the Orbbec SDK for body tracking in Windows 11. Although it was satisfying once it worked, I struggled quite a lot to run the body tracking demo in Windows 11, so there’s a learning curve, and after you have this working, you’d still need to […]
Giveaway Week 2024 – Orbbec Femto mega 3D depth and 4K RGB camera