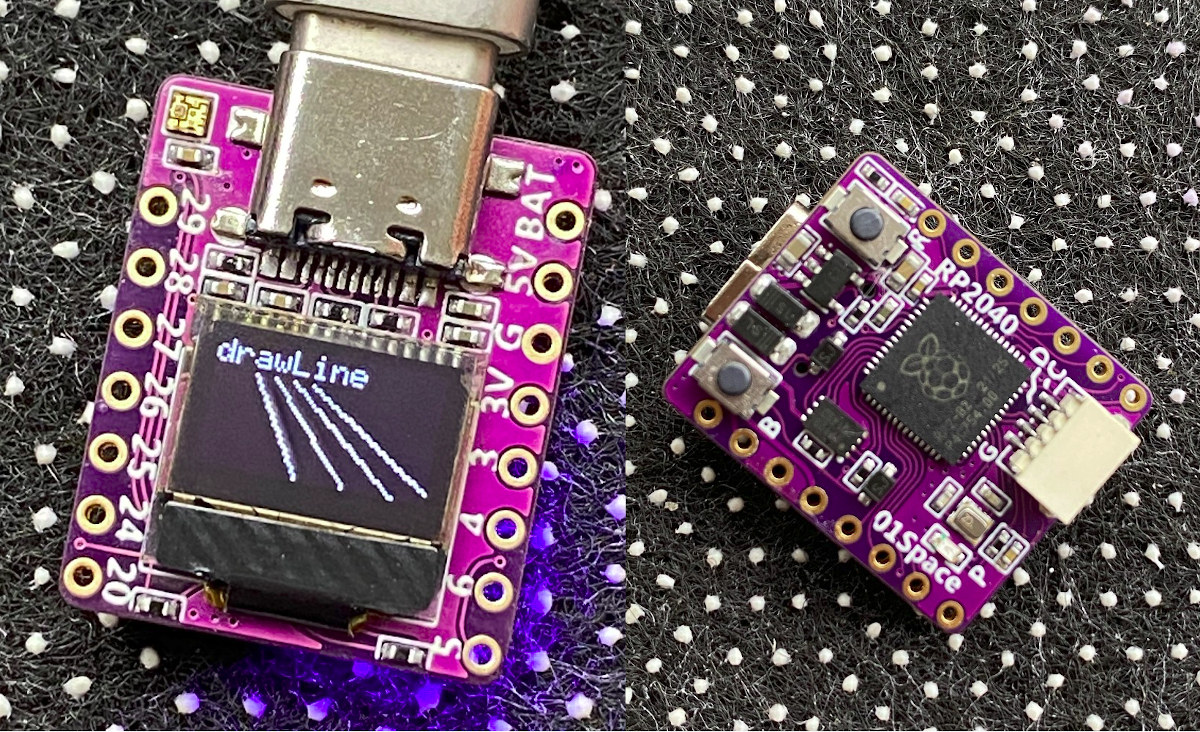
LILYGO must be churning out at least one new “ESP32” board every month, but I don’t think they’ve ever made one with ESP32-S3. LILYGO T-QT V1.1 board changes that and combines the dual-core WiFi 4 and Bluetooth LE 5.0 AI microcontroller with a 0.85-inch color display. The board also happens to be rather small and cute with a 33 x 18 mm form factor, offers some I/O via headers and a 4-pin connector, and can be powered via its USB Type-C port or a battery, but lacks a charging circuit. LILYGO T-QT V1.1 specifications: Wireless MCU – Espressif Systems ESP32-S3 dual-core Tensilica LX7 @ up to 240 MHz with vector instructions for AI acceleration, 512KB RAM, wireless connectivity Storage – 8MB flash Connectivity via ESP32-S3 2.4 GHz 802.11 b/g/n Wi-Fi 4 with 40 MHz bandwidth support Bluetooth Low Energy (BLE) 5.0 connectivity with long-range support, up to 2Mbps data rate. […]
LILYGO T-QT V1.1 – A cute little board with ESP32-S3 and a 0.85-inch color display