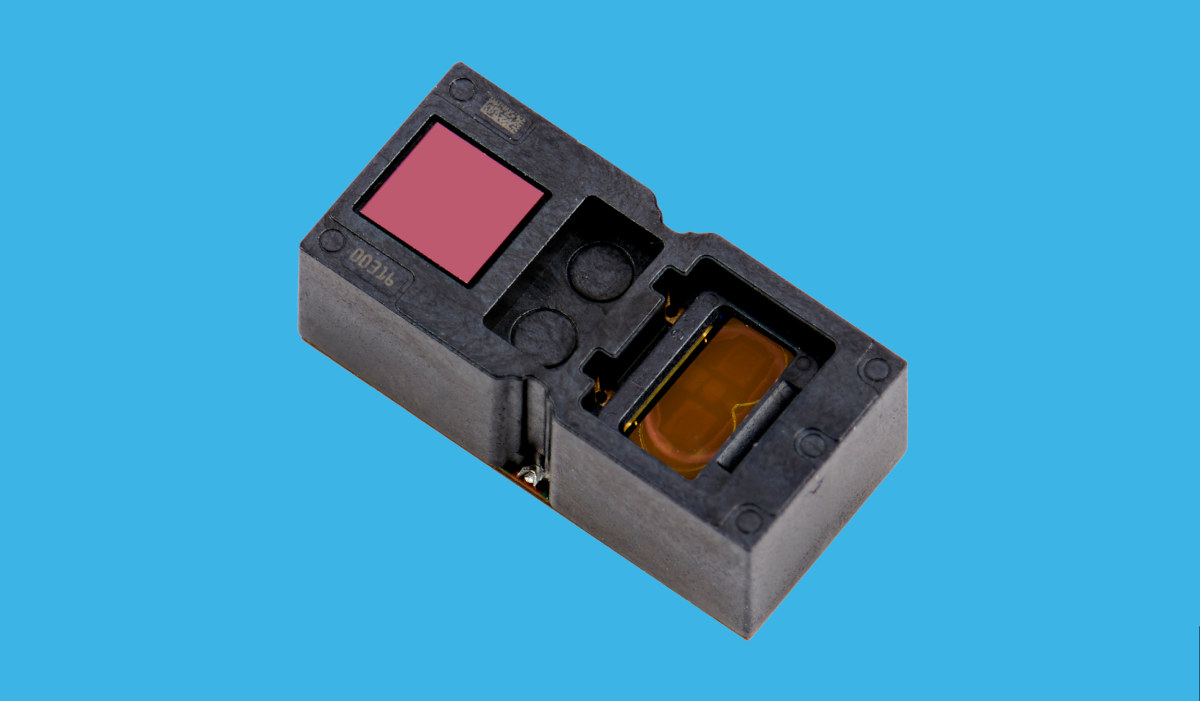
Sony AS-DT1 is a tiny and precise LiDAR depth sensor, which the company claims is the world’s smallest at just 31 x 29 x 29mm and the world’s lightest at 50 grams compared to other solutions with a range of 10 meters or more. It is designed for applications such as drones for inspections and surveys, autonomous mobile robots, food service robots, and warehouse automation. The LiDAR module uses Direct Time of Flight (dToF) LiDAR technology with a Single Photon Avalanche Diode (SPAD) sensor to deliver fast, accurate three-dimensional distance measurements both indoors and outdoors. According to the company, the sensor can measure a range of up to 40 meters indoors and 20 meters outdoors, even in bright light, with ±0.2-inch (+/-0.5mm) accuracy at 10 meters, and a distance resolution of 0.98 inches (2.5cm). Featuring a rugged yet lightweight aluminum alloy housing, two USB-C ports, and connectors for external power, […]
Sony AS-DT1 tiny industrial LiDAR depth sensor can operate under bright conditions (up to 100,000 lux)