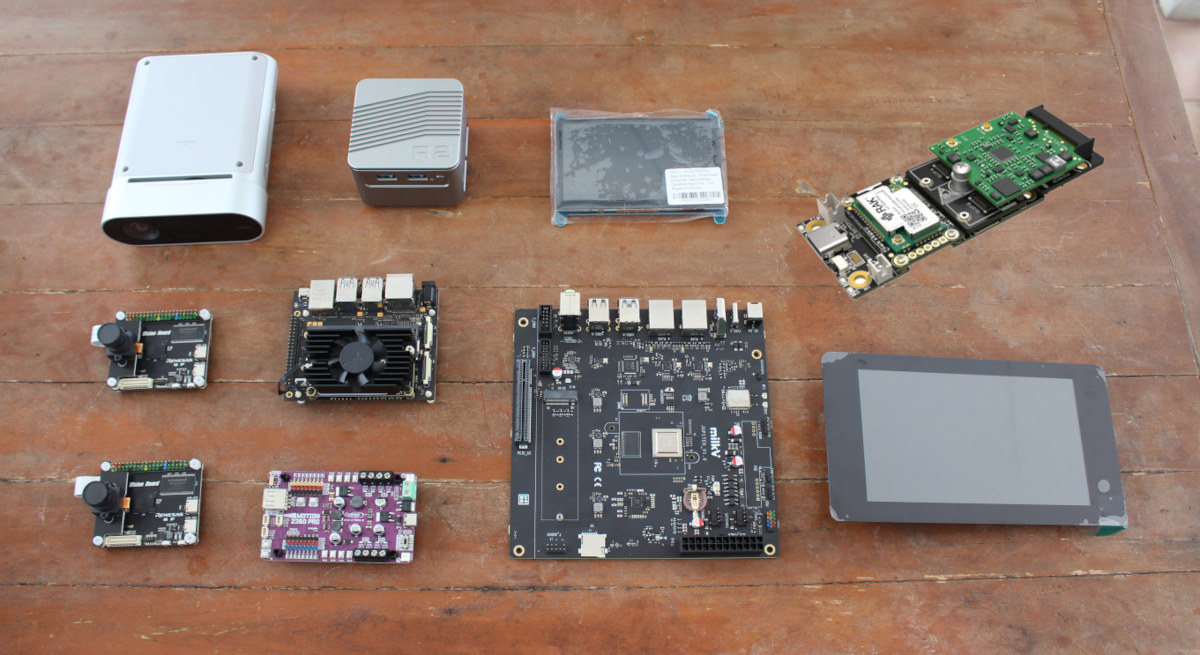
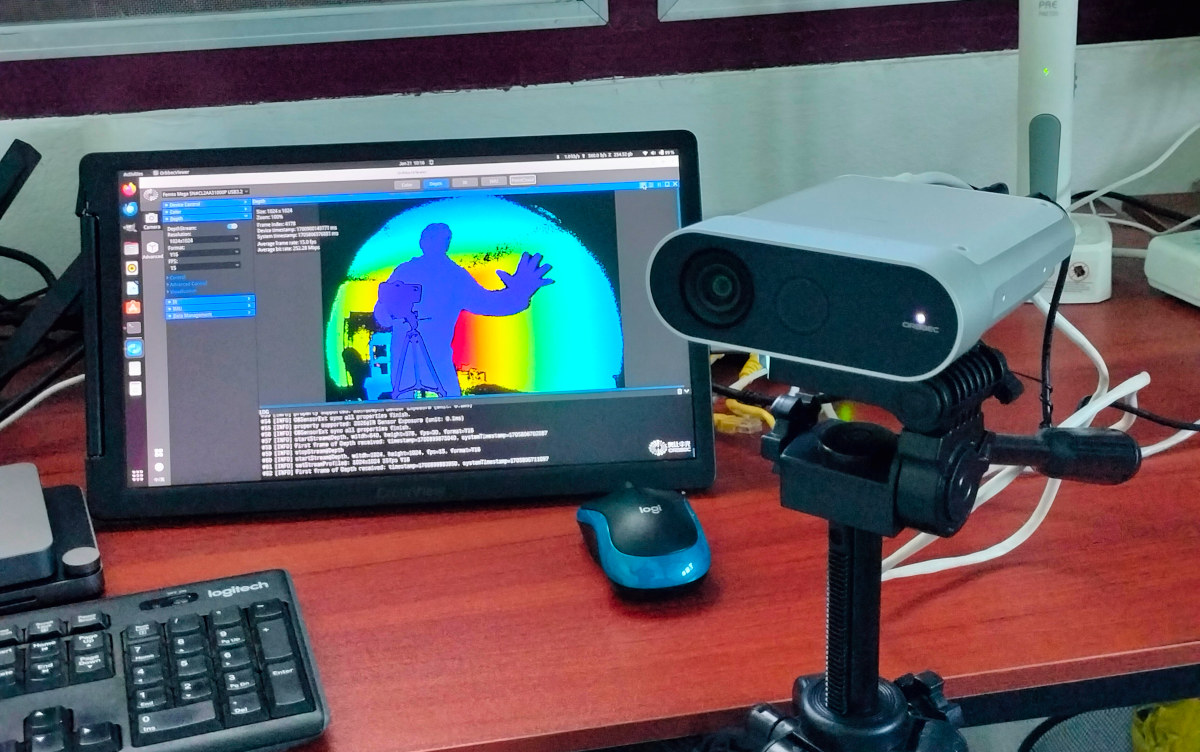
We’re now ready to announce the winners of CNX Software’s Giveaway Week 2024. We offered some of the review samples we tested (and some we did not test) in the last year, and for the fourth year running, RAKwireless also gave away two IoT development kits shipped directly to winners. This year’s prizes also included a RISC-V motherboard, a 3D depth camera, a few Arm development boards, two touchscreen displays, and an Alder Lake-N mini PC/router. All those products can be seen in the photo, minus some accessories. You’ll find more than seven devices because we organized the third Giveaway Week on CNX Software Thailand simultaneously with four prizes. We had seven winners on CNX Software: Jupiter RISC-V mini-ITX motherboard – François-Denis, Canada Orbbec Femto mega 3D depth and 4K RGB camera – Reifu, Japan RAKwireless Blues.ONE LoRaWAN, LTE-M, and NB-IoT devkit – OldCrow, Portugal Mixtile Core 3588E development kit […]
Giveaway Week 2024 winners announced!