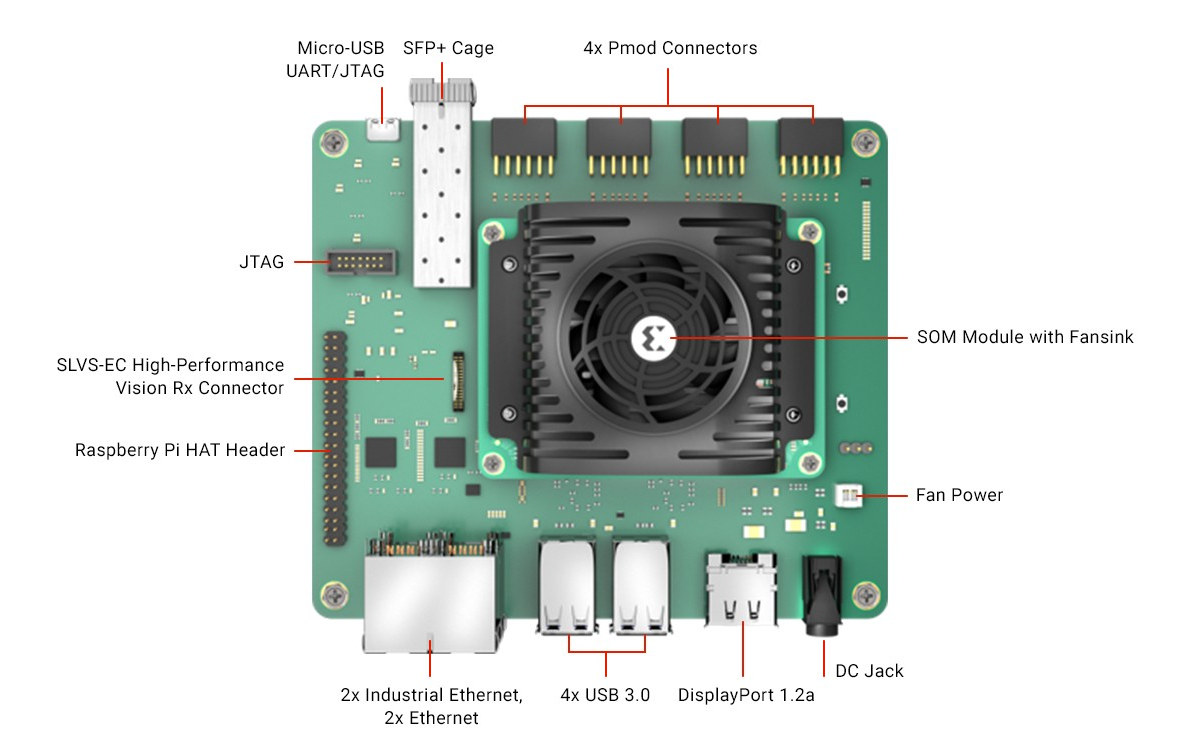
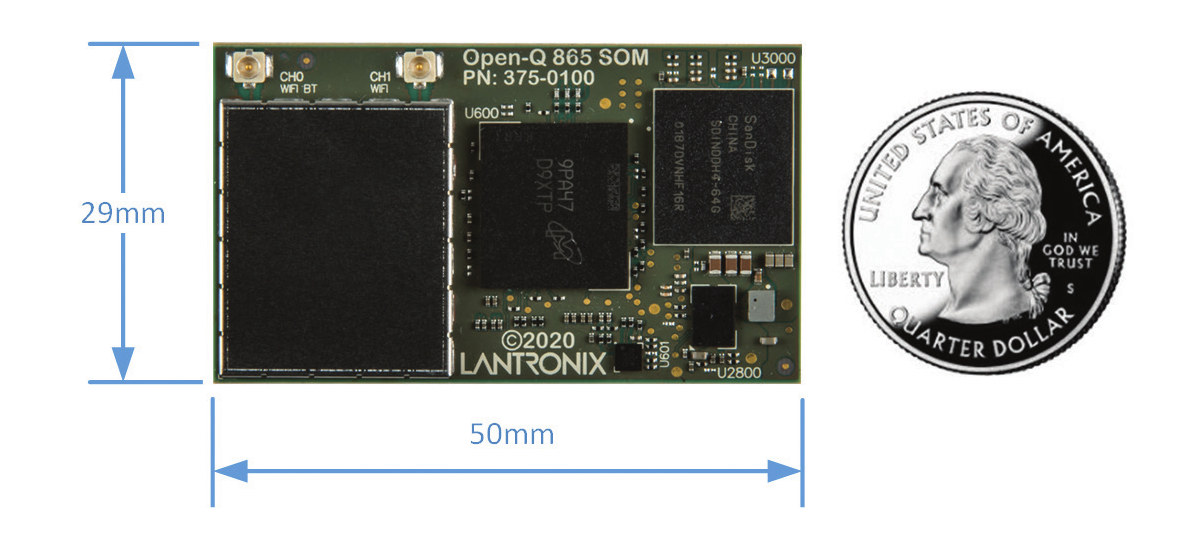
AMD Xilinx Kria KR260 Robotics Starter Kit features the Kria K26 Zynq UltraScale+ XCK26 FPGA MPSoC system-on-module (SoM) introduced last year together with the Kria KV260 Vision AI Starter Kit. Designed as a development platform for robotics and industrial applications, the KR260 is said to deliver nearly 5x productivity gain, up to 8x better performance per watt and 3.5x lower latency compared to Nvidia Jetson AGX Xavier or Jetson Nano kits. We’ll have a better look at the details below. Kria KR260 Robotics Starter Kit specifications: SoM – Kria K26 module with: MPSoC – Xilinx Zynq Ultrascale+ custom-built XCK26 with quad-core Arm Cortex-A53 processor up to 1.5GHz, dual-core Arm Cortex-R5F real-time processor up to 600MHz, Mali-400 MP2 GPU up to 667MHz, 4Kp60 VPU, 26.6Mb On-Chip SRAM, 256K logic cells, 1,248 DSP slices, 144 Block RAM blocks, 64 UltraRAM blocks System Memory – 4GB 64-bit DDR4 (non-ECC) Storage – 512 Mbit […]
$349 AMD Kria KR260 Robotics Starter Kit takes on NVIDIA Jetson AGX Xavier devkit