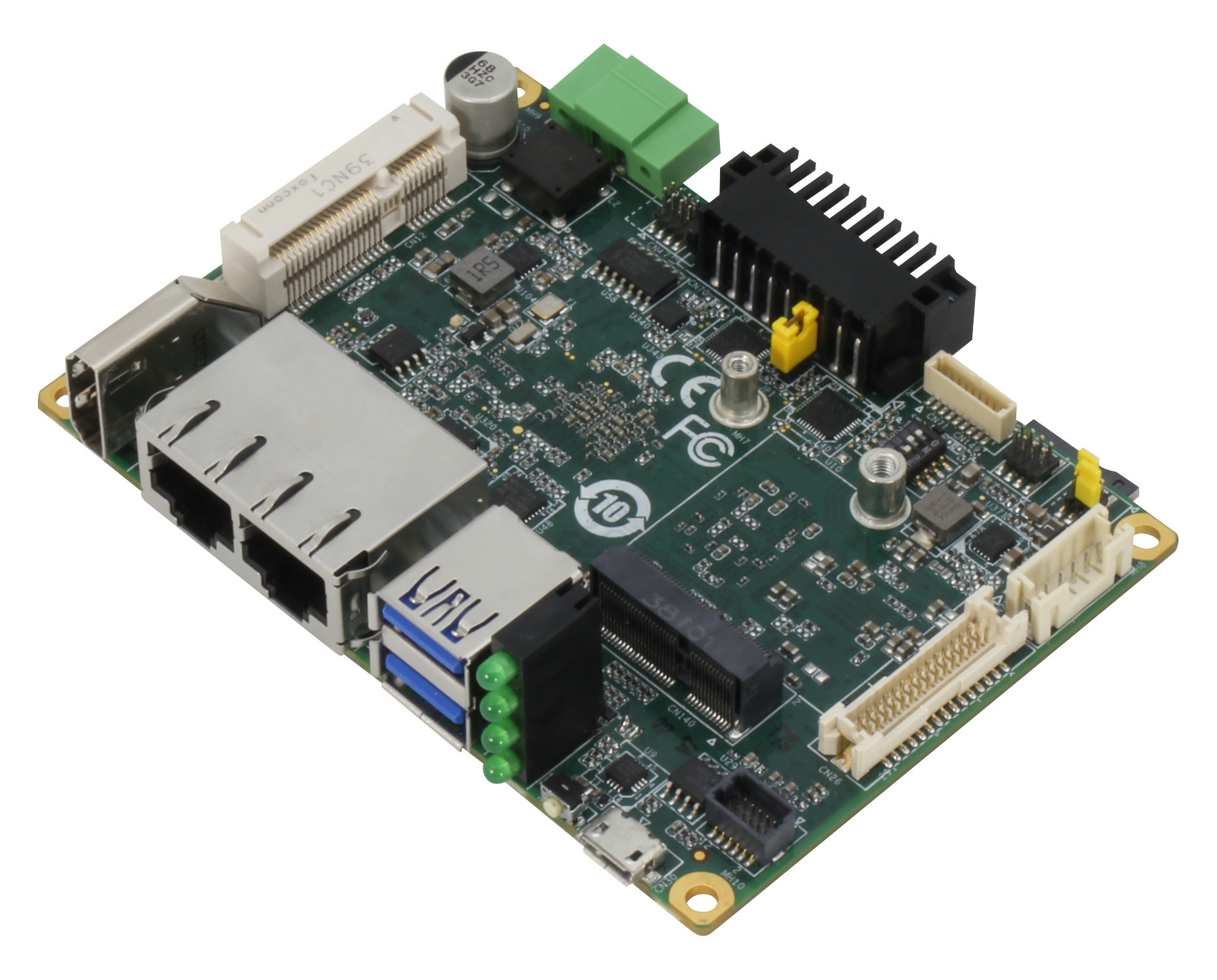
ASUS Tinker Board 3 is a credit card-sized SBC based on Rockchip RK3566 SoC with an HDMI port, a 3.5mm audio jack, gigabit Ethernet, an M.2 socket for WiFi and Bluetooth, four USB ports, and a 40-pin GPIO header with a layout similar to the Raspberry Pi 3 Model B. When I first wrote about the Tinker Board 3 in 2023, it was a larger (100 x 100 mm) SBC based on Rockchip RK3568 SoC that was later renamed to Tinker Board 3N, now also available as a complete rugged system (more about that in a subsequent post). The new Tinker Board 3 (2024) is a completely different design that competes against Radxa ROCK 3C and Orange Pi 3B boards also based on RK3566 and offered in a business card/credit card form factor similar to the Raspberry Pi 3B. Tinker Board 3 specifications: SoC – Rockchip RK3566 CPU – Quad-core […]
ASUS Tinker Board 3 – A credit-card sized Rockchip RK3566 SBC with 12V to 19V DC input