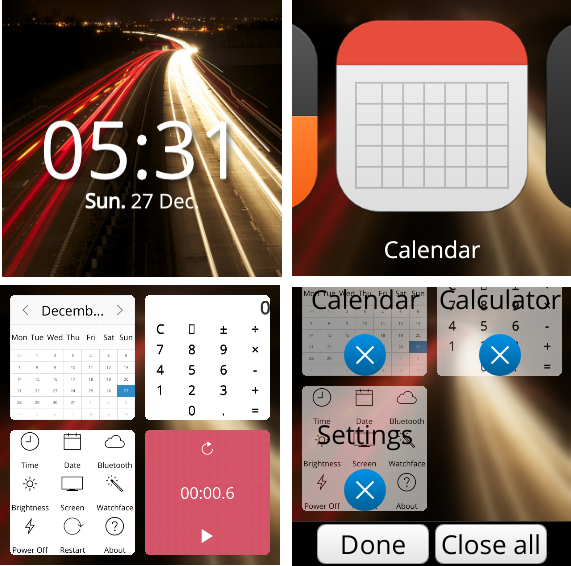
If you own an Android or Android Wear smartwatch, but would like more control over its functionality or simply prefer a truly open source operating systems for your watch, AsteroidOS could be the answer. Like alternative mobile operating systems such as Sailfish OS or Ubuntu Touch, AsteroidOS leverages existing Android drivers via libhybris library, and the user interface relies on Qt5 and QML running on top of OpenEmbedded, while Bluetooth is handled by BlueZ 5 library. There’s no company behind the project, and it is purely community driven. Currently only the LG G watch is supported, and you can give AsteroidOS a try by following the instructions. The Wiki provides information about the boot process, how to build the OS, creating an Qt5/QML app. etc.. and also explains how to port AsteroidOS to other watches, so if the project gets traction more devices will be supported. There are several ways […]
AsteroidOS is an Open Source Operating System for Your Android (Wear) Smartwatch