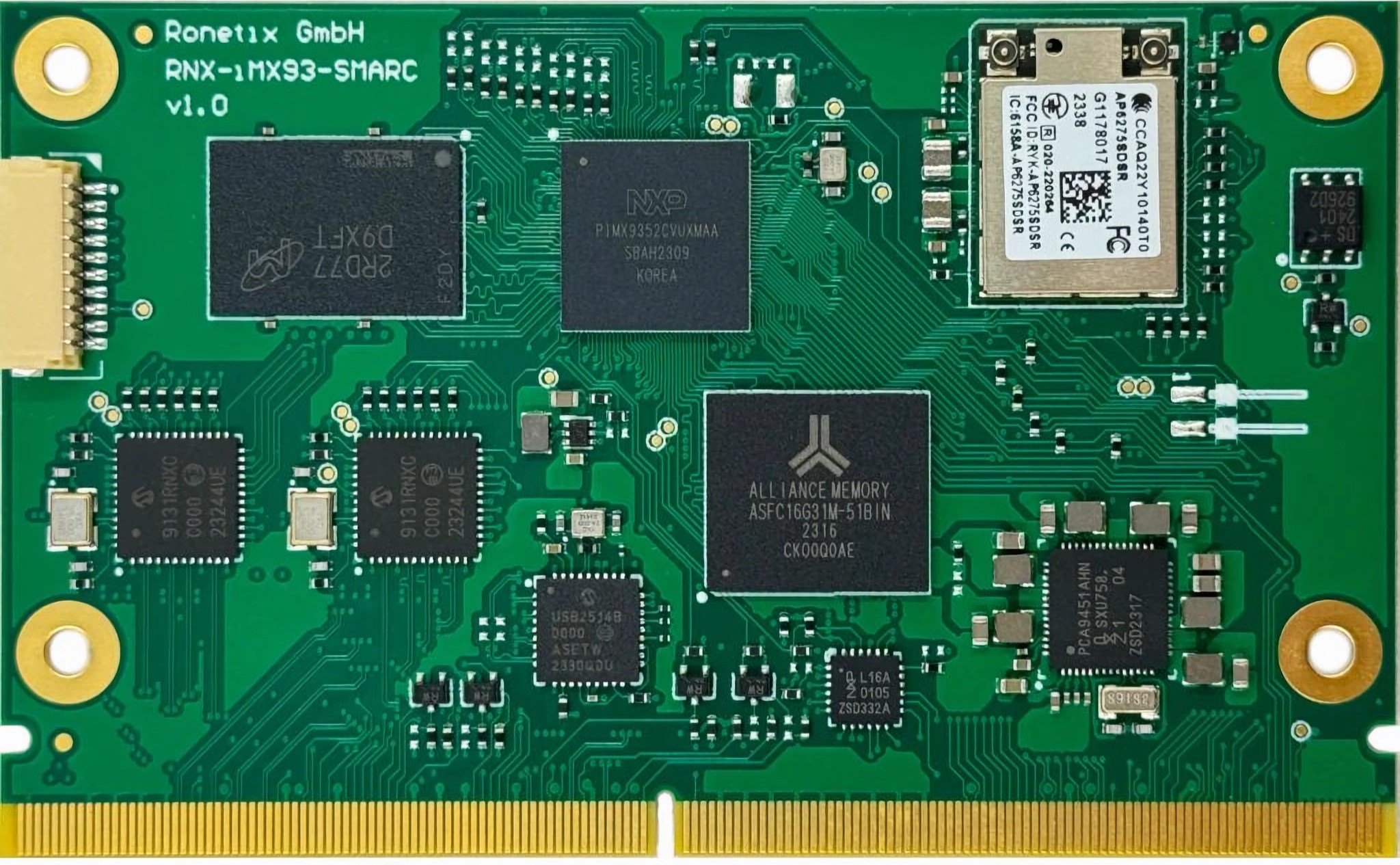
Austrian embedded equipment manufacturer, Ronetix, has released two i.MX93 system-on-modules (SoMs): the RNX-iMX93-OSM that follows the Open Standard Module (OSM) form factor, and the RNX-iMX93-SMARC compliant with the SMARC 2.1 (smart mobility architecture) standard. Ronetix i.MX93 SoMs are powered by the NXP i.MX93 processor featuring a 64-bit dual-core Arm Cortex-A55 application processor running at 1.7GHz and a Cortex-M33 core running at 250MHz for low-latency and real-time tasks. The SoC supports up to 2GB LPDDR4 RAM and 512GB eMMC storage, and the integrated Arm Ethos-U65 microNPU offers up to 0.5 TOPS of computing power for machine vision applications and intelligent energy management (IEM). Applicable for industrial automation and IoT, the SoMs also feature two CAN and Ethernet interfaces to aid high-speed data transfer. Other hardware featuring the i.MX93 that we have covered recently include the ADLINK OSM-IMX93, MaaXBoard OSM93, and Ka-Ro Electronics’ QS93. The RNX-iMX93-SMARC system-on-module comes in 82 x 50mm […]
Ronetix launches NXP i.MX93 SoMs in SMARC and OSM-L form factors