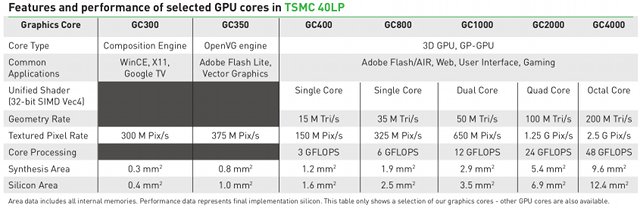
I’m always very confused when it comes to comparing GPUs in different SoCs, and I could not really find comparisons on the web, so I’m going to give it a try even though, as you’re going to find out, it’s actually quite a challenge. There are mainly 4 companies that provide GPUs: ARM, Imagination Technologies, Vivante and Nvidia. [Update: Two comments mentioned Qualcomm Adreno and Broadcom VideoCore are missing from the list. Maybe I’ll do an update later]. Each company offers many different versions and flavors of their GPU as summarized below. ARM Imagination Technologies Vivante Nvidia Mali-400 Series: Mali-400 MP Mali-450 MP Mali-600 Series Mali-T604 Mali-T624 Mali-T628 Mali-T658 Mali-T678 PowerVR SGX Series 5: SGX520 SGX530 SGX531 SGX535 SGX540 SGX545 PowerVR SGX Series 5XT: SGX543MP1-16 SGX544MP1-16 SGX554MP1-16 PowerVR SGX Series 6: G6200 G6230 G6400 G6430 G6600 2D graphics: GC300 GC350 3D graphics: GC400 GC800 GC1000 GC2000 GC4000 ULP GeForce (Tegra […]
GPUs Comparison: ARM Mali vs Vivante GCxxx vs PowerVR SGX vs Nvidia Geforce ULP