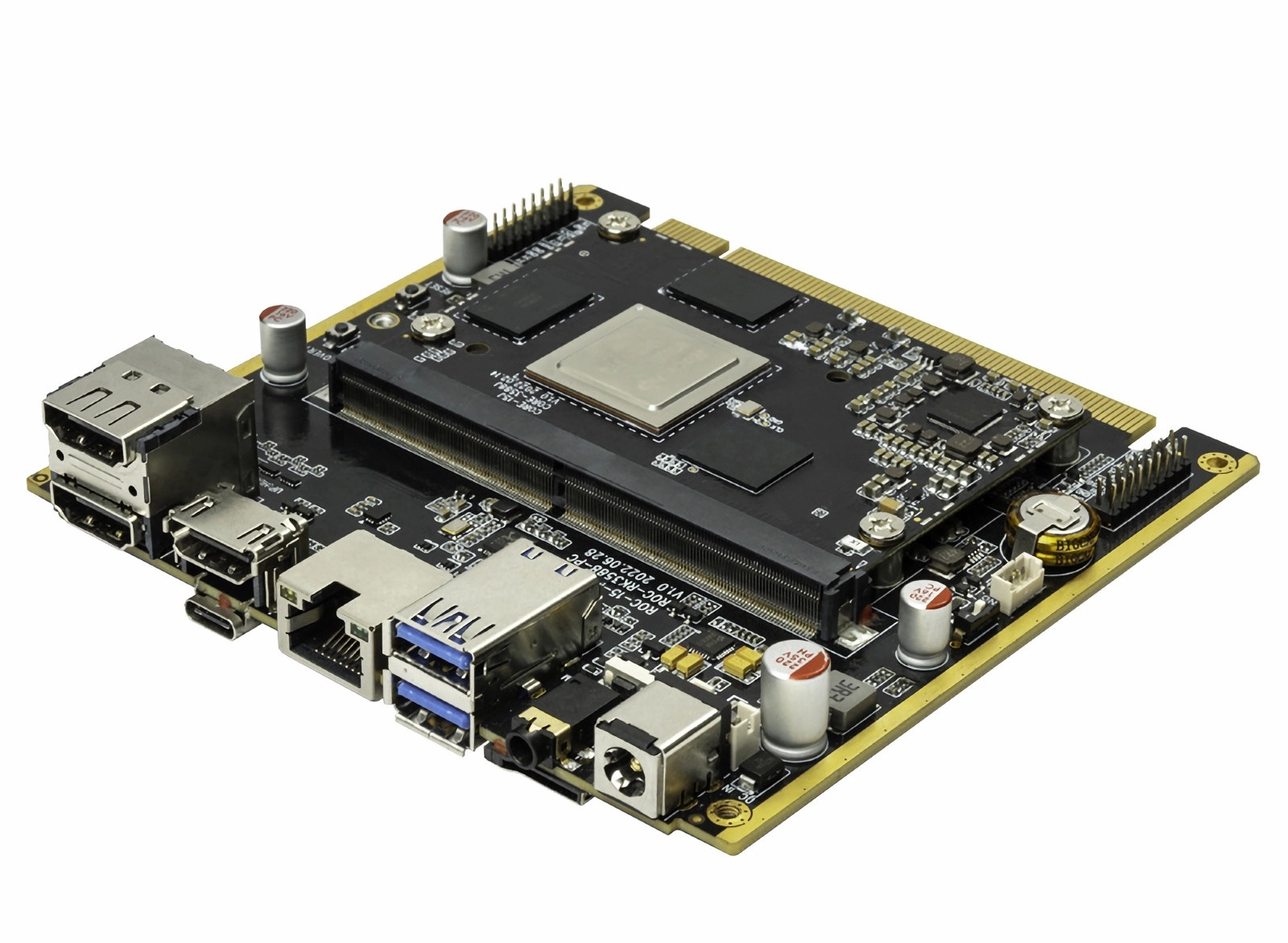
Aetina has launched fanless edge AI embedded box PCs powered by NVIDIA Jetson Orin system-on-modules (SoM), namely the AIE-CN31/41, AIE-CO21/31, AIE-PN32/42, and AIE-PO22/32 models featuring the Orin NX or Orin Nano modules, and the AIE-PX11/12/21/22 and AIE-PX13/23 embedded systems fitted with the more powerful Jetson AGX Orin module. All new fanless Ubuntu 20.04 embedded computers are suitable for AI-powered applications and work in an operating temperature range of -25°C to +55°C. When I first read the email press release, I thought it was a refresh of an old PR since I had written about Aetina NVIDIA Jetson Orin Nano and Orin NX edge embedded systems last January. But those are new models with similar specifications, but housed in a fanless enclosure with a large heatsink, while variants unveiled at CES 2023 were all actively cooled. Let’s have a closer look at the AIE-CO21, AIE-CO31, AIE-CN31, and AIE-CN41 models with some […]
Aetina introduces fanless NVIDIA Jetson Orin embedded box PCs with Ubuntu 20.04