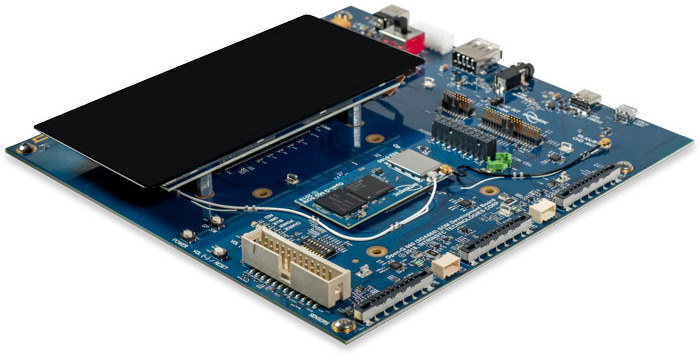
Intrinsyc introduced the first Qualcomm Snapdragon 845 hardware development platform last year with its Open-Q 845 HDK designed for OEMs and device makers. But the company has now just announced a solution for embedded systems and Internet of Things (IoT) products with Open-Q 845 micro system-on-module (µSOM) powered by the Snapdragon 845 octa-core processor, as well as a complete development kit featuring the module and a Mini-ITX baseboard. Open-Q845 µSOM Specifications: SoC – Qualcomm Snapdragon SDA845 octa-core processor with 4x Kryo 385 Gold cores @ 2.649GHz + 4x Kryo 385 Silver low-power cores @ 1.766GHz cores, Hexagon 685 DSP, Adreno 630 GPU with OpenGL ES 3.2 + AEP (Android Extension Pack), DX next, Vulkan 2, OpenCL 2.0 full profile System Memory – 4GB or 6GB dual-channel high-speed LPDDR4X SDRAM at 1866MHz Storage – 32GB or 64GB UFS Flash Storage Connectivity Wi-Fi 5 802.11a/b/g/n/ac 2.4/5Ghz 2×2 MU-MIMO (WCN3990) with 5 GHz […]
Intrinsyc Unveils Open-Q 845 µSOM and Snapdragon 845 Mini-ITX Development Kit