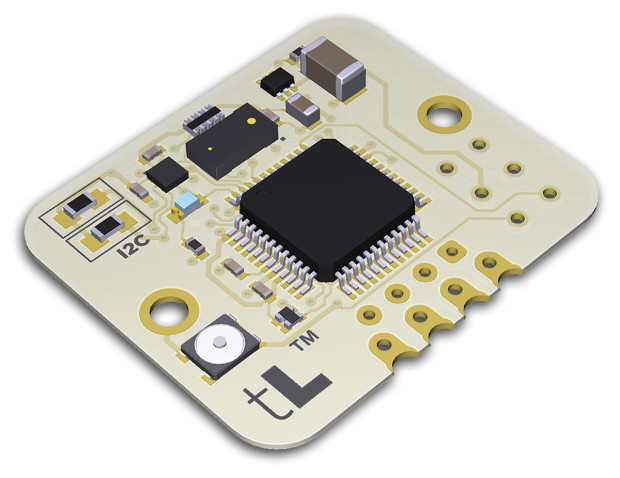
TinyLIDAR is an inexpensive and compact board based on STMicro VL53L0X Time-of-Flight (ToF) ranging sensor that allows you to measure distance up to 2 meters using infrared signals, and with up to 60 Hz. Contrary to most other VL53L0X boards, it also includes an STM32L0 micro-controller that takes care of most of the processing, frees up resource on your host board (e.g. Arduino UNO), and should be easier to control thanks to I2C commands. The project was successfully funded on Indiegogo by close to 600 backers, and the company contacted me to provided a sample of the board, which I have now received, and tested with Arduino (Leonardo), and Raspberry Pi (2). TinyLIDAR Unboxing I was expecting a single board, but instead I received a bubble envelop with five small zipped packages. Opening them up revealed three TinyLIDAR boards, the corresponding Grove to jumper cables, and a bracket PCB for […]
Getting Started with TinyLIDAR Time-of-Flight Sensor on Arduino and Raspberry Pi