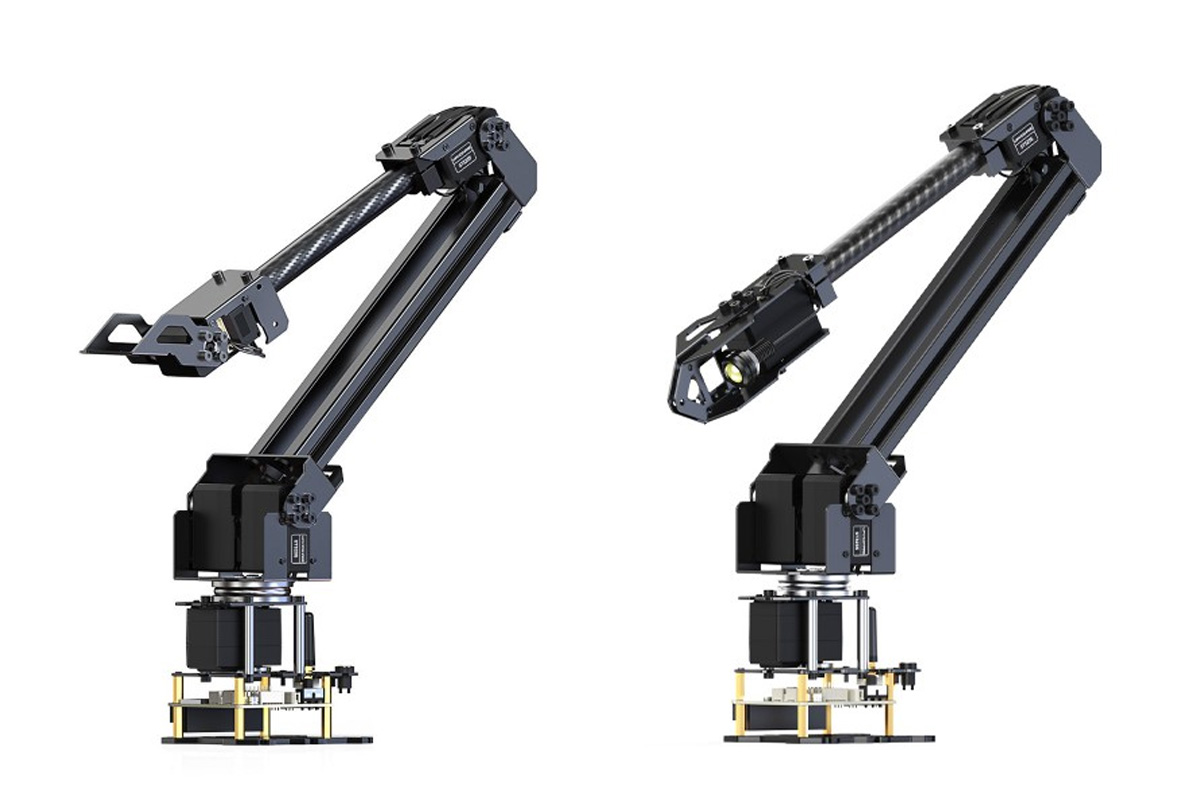
Waveshare has recently launched the RoArm-M2-S and RoArm-M2-Pro ESP32 robotic arms with four degrees of freedom, or 4-DOF for short. The main difference is that the RoArm-M2-S is equipped with standard servos, while the RoArm-M2-Pro features all-metal ST3235 bus servos, adding more durability and performance. Designed for educational and robotics applications, the 4-DOF RoArm-M2 is sturdy yet lightweight, built using carbon fiber and aluminum alloy. It can handle payloads up to 0.5kg and has a workspace diameter of 1 meter. The arm offers high precision with a 12-bit magnetic encoder and dual-drive technology for improved torque and stability. On top of that, it features a 12-bit magnetic encoder and dual-drive technology for improved torque and stability. Other features include a 360° omnidirectional base and support for both wireless (WiFi, ESP-NOW) and wired (USB) control. These features make this device suitable for various applications including industrial automation, education, research, and DIY robotics projects. Waveshare […]
Waveshare RoArm-M2 ESP32 robotic arms offer four degrees of freedom, various servo options