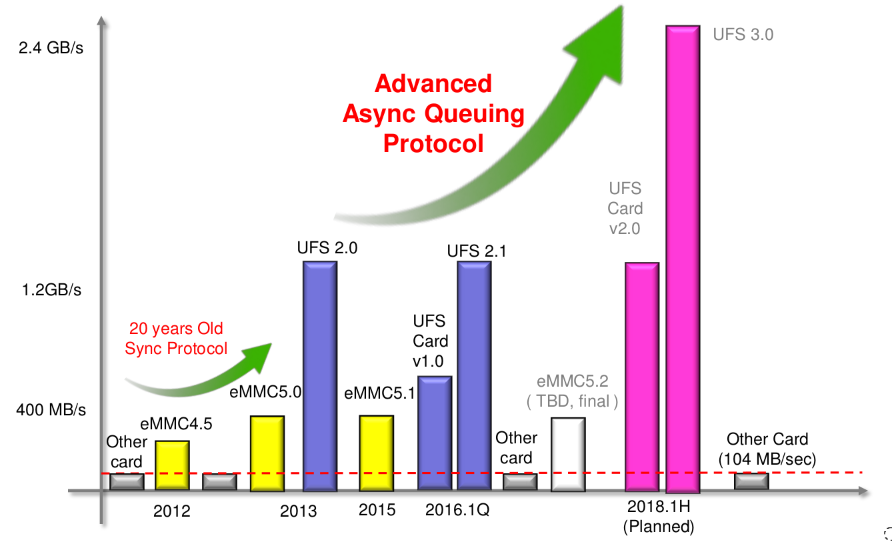
All my devices still rely on eMMC flash for storage, but premium smartphones, for example, make use of UFS 2.0/UFS 2.1 flash storage with performance similar to SSD, with Samsung UFS 2.0 storage achieving up to 850MB/s read speed, 260 MB/s write speed, and 50K/30K R/W IOPS. UFS 3.0 promises to roughly double the performance of UFS 2.0/2.1 with transfer rates of up to 2.4 GB/s, and separately, the UFS Card v2.0 standard should deliver UFS 2.1 performance on removable storage. Several Chinese and Taiwanese websites, including CTimes and Benchlife, have reported that companies have started getting UFS 3.0 & UFS Card v2.0 licenses from JEDEC, and Phison is working on a controller to support both new standards, and scheduled to launch in 2018. Premium smartphone SoC are only expect to support UFS 3.0 in 2019 and beyond, and hopefully by that time eMMC will have been replaced by UFS 2.0/2.1 […]
UFS 3.0 Embedded Flash to Support Full-Duplex 2.4GB/s Transfer Speeds