
Medical equipments can be really expensive because of the R&D involved and resulting patents, low manufacturing volume, government regulations, and so on. Developed countries can normally afford those higher costs, but for many it may just be prohibitively expensive. The Open Surgery initiative aims to mitigate the costs by “investigating whether building DIY surgical robots, outside the scope of healthcare regulations, could plausibly provide an accessible alternative to the costly professional healthcare services worldwide”.
The project is composed of member from the medical, software, hardware, and 3D printing communities, is not intended for (commercial) application, and currently serves only academic purposes.
Commercial surgical robots can cost up to $2,000,000, but brings benefits like smaller incisions, reduced risks of complications and readmissions, and shorter hospital stays thanks to a faster recovery process. There have already been several attempts within the robotics community to come up with cheaper and more portable surgical robots, such as RAVEN II Surgical robot initially developed with funding from the US military to create a portable telesurgery device for battlefield operations, and valued at $200,000. The software used to control RAVEN II has been made open source, so other people can improve on it.
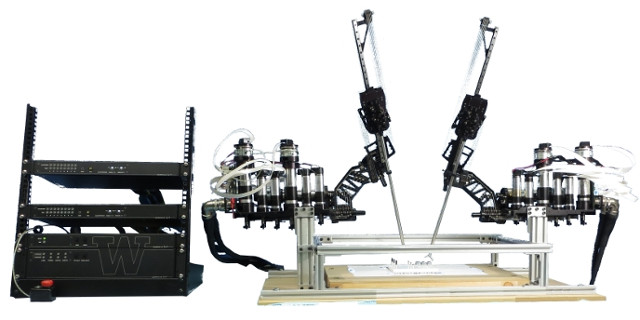
The system is currently only used by researchers in universities to experiment with robotic surgery, but it can’t be used on humans, as it lacks the required safety and quality control systems. This is a step in the right direction, but the price makes it still out of reach for most medical hacker communities, so Frank Kolkman, who setup the Open Surgery initiative, has been trying to build a DIY surgical robot for around $5000 by using as many off-the-shelf parts and prototyping techniques such as laser cutting and 3D printing for several months with the help of the community.
Three major challenges to designing a surgical robot (theoretically) capable of performing laparoscopic surgery have been identified:
- The number and size of tools: during a single operation a surgeon would switch between various types of tools, so a robot would either have to have many of them or they should be able to be interchangeable. The instruments are also extremely small, and difficult to make
- Anything that comes into contact with the human body has to be sterile to reduce the risk of infection, and most existing tools are made of stainless steel so that they can be sterilized by placing them in an autoclave, that may not be easily accessible to many people.
- The type of motion a surgical robot should be able to make, whereby a fixed point of rotation in space is created where the tool enters the body through an entry port – or ‘trocar’. The trocar needs to be stationary so as to avoid tissue damage.
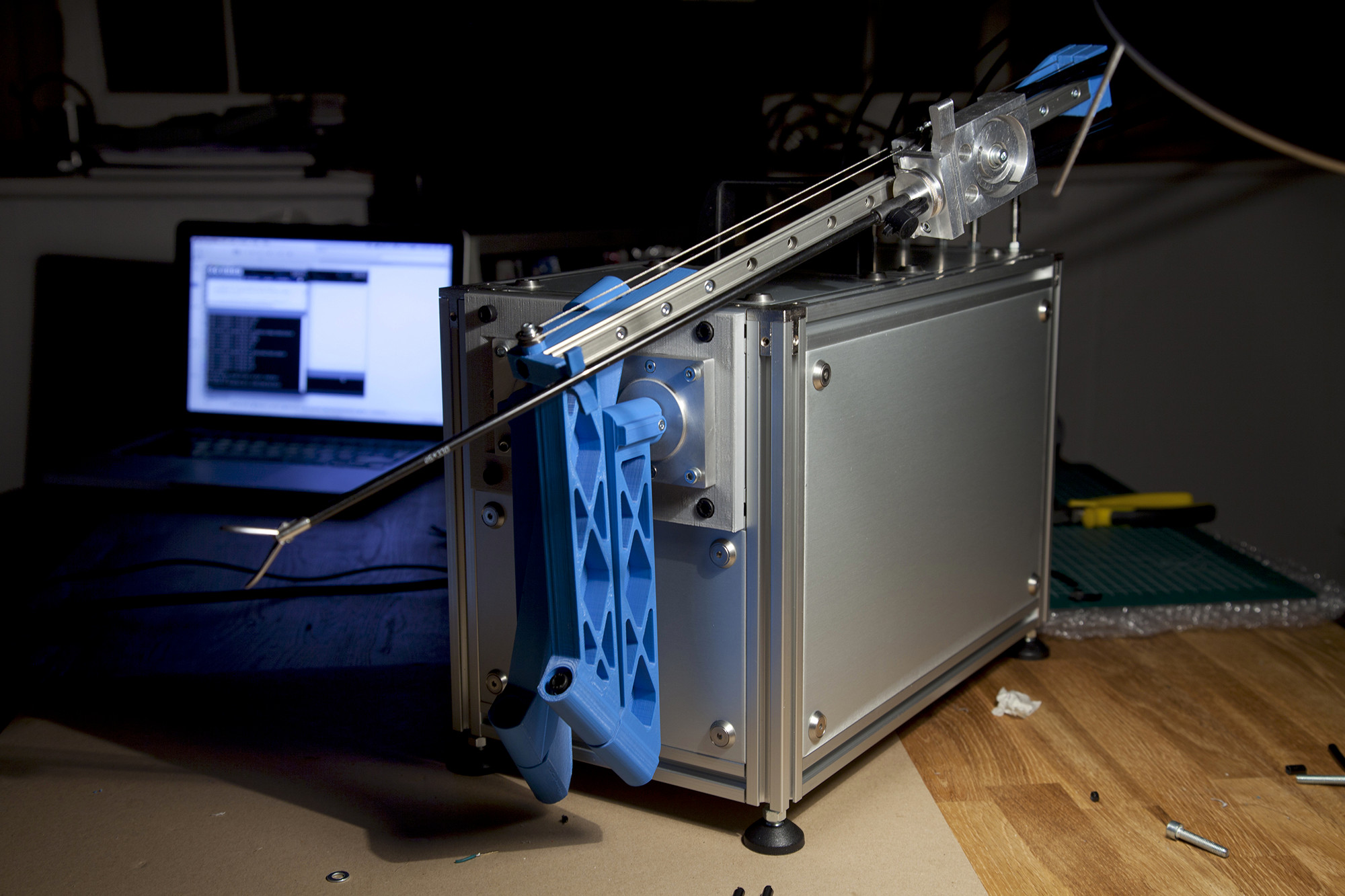
He solved the first issue by finding laporoscopic instruments on Alibaba, as well as camera, CO2 insufflation pumps, and others items. For the second hurdle, he realized a domestic oven turned to 160 degrees centigrade for 4 hours could be an alternative to an autoclave. The mechanical design was the most complicated, as it required many iterations, and he ended with some 3D printed parts, and DC servo motors. Software was written using Processing open source scripting language. You can see the results in the short video below.
While attempting surgery with the design would not be recommended just yet, a $5,000 DIY surgical robot appears to feasible. Maybe it could be evaluated by one or more trained surgeons first, and then tested on animals that needs surgery, before eventually & potentially being used on human, who would not get the treatment otherwise.
While there’s “Open” in “Open Surgery” and the initial intent was to make the project open source, it turned out it is almost impossible to design surgical robots without infringing on patents. That’s no problem as long as you make parts for private use, however Frank explains that sharing files could cause problems, and the legality of doing so requires some more research.

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress


