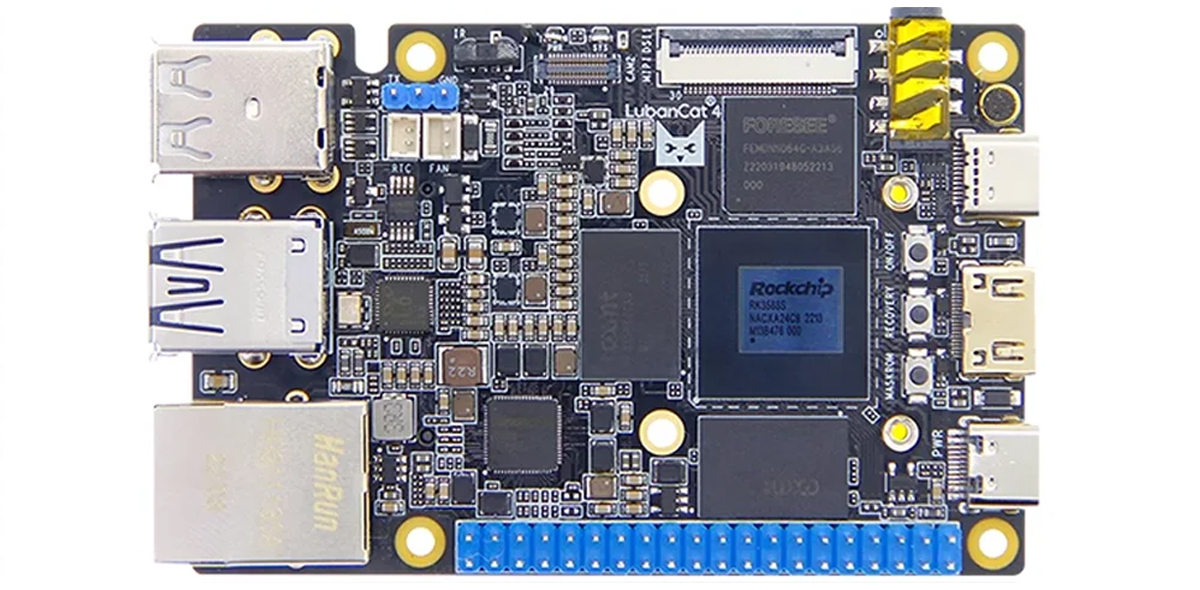
Launched by Yehuo Electronic EmbedFire LubanCat 4 card computer or LubanCat 4 in short, is a Rockchip RK3588S SBC that packs quite a lot of features in an 85x56mm form factor with Ethernet, USB, mini PCIe, HDMI 2.1, SIM & microSD card holder, and more. The board comes with up to 16GB of RAM and 128GB of eMMC flash. It comes with a Gigabit Ethernet port, five USB ports (including one USB-C), a built-in microphone, multiple audio inputs and outputs, a 40-pin Raspberry Pi compatible expansion header, and supports HDMI input through an adapter connected to a MIPI CSI port. EmbedFire LubanCat 4 card computer specifications: SoC – Rockchip RK3588S CPU – Octa-core processor with 4x Cortex-A76 cores @ up to 2.2-2.4 GHz, 4x Cortex-A55 cores @ up to 1.8 GHz GPU – Arm Mali-G610 GPU with OpenGL ES 3.2, OpenCL 2.2, and Vulkan 1.2 support VPU – 8Kp60 video decoder […]
EmbedFire LubanCat 4 card computer – A Rockchip RK3588S dev board with a mini PCIe socket for WiFi or 4G LTE