
Earlier today I wrote about FOSDEM 2018 schedule, and among the various talks I selected for my virtual schedule was “How to build an autonomous robot for less than 2K€”. Some excerpt from the abstract including a short description of the project, and its “open-sourceness”:
PULUrobot solves the autonomous mobile robotics complexity issue without expensive parts, without compromise. By fearless integration and from-scratch design, our platform can do SLAM, avoid obstacles, feed itself, and carry payload over 100kg, for less than 2,000 EUR.
Application ecosystem can be born around it, as we offer a ready-made Open Source (GPLv2) solution in a tightly coupled HW-SW codesign.
So I decided to have a closer at this project, which can be used as a robot maid/helper of sort, and other applications.
 The robot was made by a brand new (July 2017) startup called Pulu Robotics Oy and based in Finland. They have three models:
The robot was made by a brand new (July 2017) startup called Pulu Robotics Oy and based in Finland. They have three models:
- Pulurobot S – Small version capable of carrying up to 100 kg
- Pulurobot M – Mid-sized version capable of carrying up to 130 kg
- Pulurobot L – Larger model designed for factory floors and capable of carrying up to 300 kg
S & M model are similar in design, except the latter is larger, while the L model appears to be in a earlier stage of development. Pulurobot M comes with the most documentation, so that’s the model we’ll look at in details with the specs of the sixth revision of the prototype:
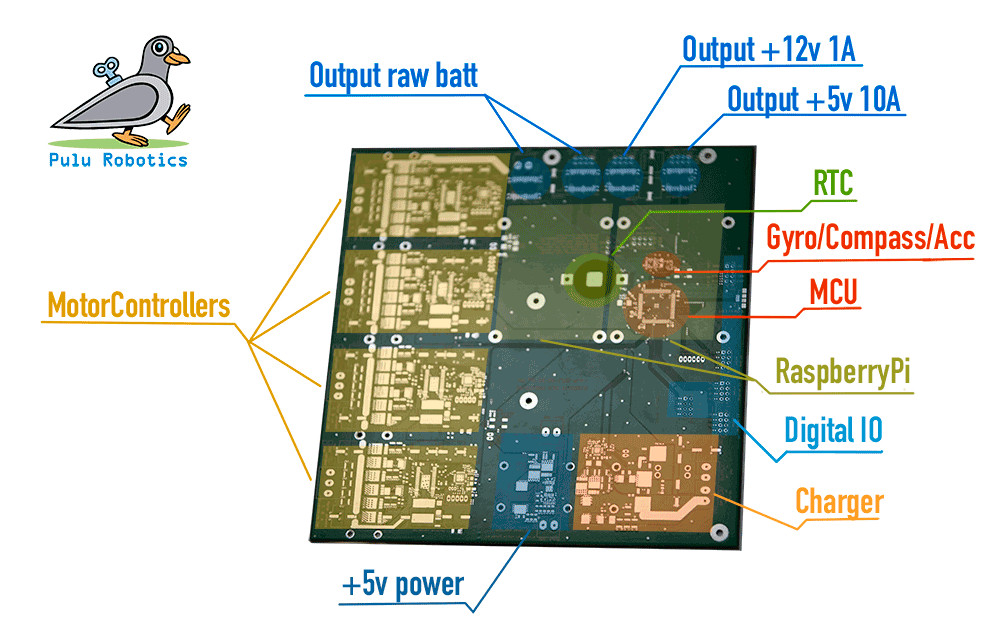
- Controller board
- MCU – STM32 microcontroller for sensor management & low-level navigation
- SBC – Slot for Raspberry Pi 2 or 3 for running mapping (SLAM) & route finding algorithms
- Connectivity – WiFi and/or 3G/4G
- Sensor – MEMS gyroscope, accelerometer, compass
- Motor controllers – 4pcs BLDC motor controllers, 700W peak, to support four-wheel drive computation
- Power Supply – 5V/10A
- Charger – 100W Lithium ion charger
- Vision
- 2D 360 degree LIDAR
- Low-cost off-the-shelf 3D Time-of-Flight camera (SoftKinetic DepthSense) for mapping close obstacles
- Chassis
- Riveted, laser-cut aluminum chassis
- Robust suspension: always four wheels on the ground
- Two-wheel drive, BLDC hub motors (similar to hoverboards)
- Supports 130kg loading
- Battery – 18650-based lithium ion battery
- Charging – Can find and mount to its charger automatically
The company is however working on improvements to lower the cost / improve functionality, and will replace expensive off-the-shelf vision parts with their own 3D vision system supporting 360-degree x 40-degree true 3D vision with 100 000 distance measurement points, 5 to 10 fps. They’ll also add the ability for the robot to find any standard wall outlet to charge itself automatically, and redesign the chassis for lower cost, high-quality mass manufacturing.
While the project is supposed to be open source, they have not released anything yet, but maybe we’ll find out more once FOSDEM is underway. We just know they decided not to use ROS. Applications for such robots include delivery boy, cleaner trolley, recycle bin, coffee trolley, night guard, telepresence, and more.
While development is still in progress, they’ve already sold 25 units they plan(ed) to deliver this month. It’s unclear whether the sub 2,000 Euros price is for the S or M model, as I don’t know the price for such robots. Pulurobot M availability is planned for Spring 2018. More details can be found on the company’s website. You can also watch a demo of Pulurobot M prototype version 4 carrying 58 kg of weights.

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress



Hi everyone! We have been busy doing the robot and the website has not been updated since september 2017. I placed fresh info and pictures there, and also a video telling more than a thousand words what the project looks like now. Pulu M has evolved quite a bit from the situation in the story above. See You at Fosdem 2018, we offer exceptional developer pricing at site, check our website! Pulu is the first robot project that works out of the box (add sim card), is simple enough to anyone to understand and does need programming at all to… Read more »
FOSDEM 2018
The Pulu Robotics published Open Source SW in FOSDEM. See: https://fosdem.org/2018/schedule/event/autonomous_robot/attachments/slides/2414/export/events/attachments/autonomous_robot/slides/2414/fosdem_pulu.pdf
FODEM 2018 Video is up
https://www.youtube.com/watch?v=wRRjCMZhImE