
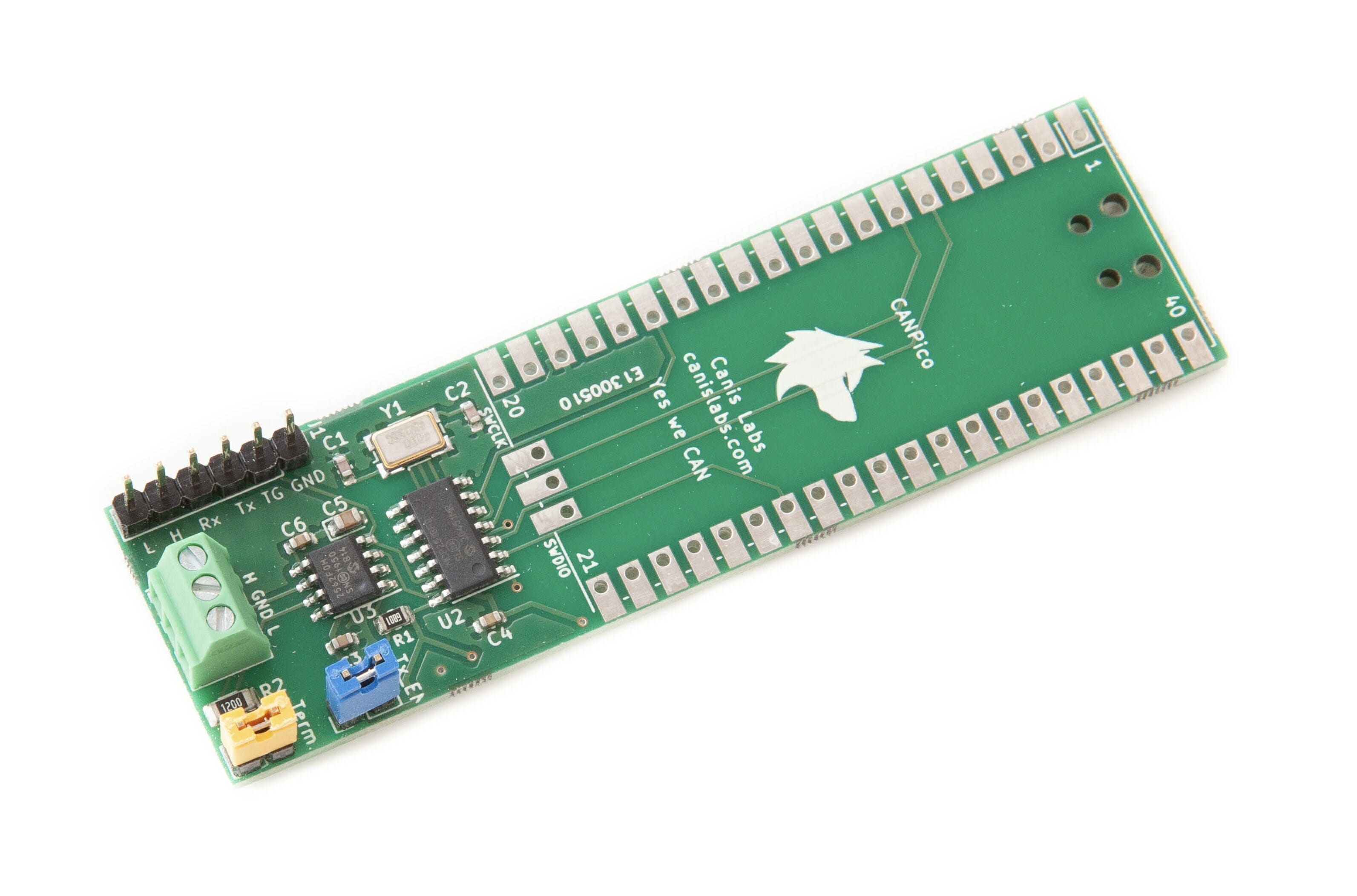
Canis Labs’ CANPico board adds a CAN bus to the Raspberry Pi Pico. The open-source hardware board can then be used as a CAN adapter connected to a host computer
The company also provides an open-source MicroPython SDK, as well as a pre-built firmware image to quickly make it started, making it possible to easily control or monitor the CAN bus using Python.
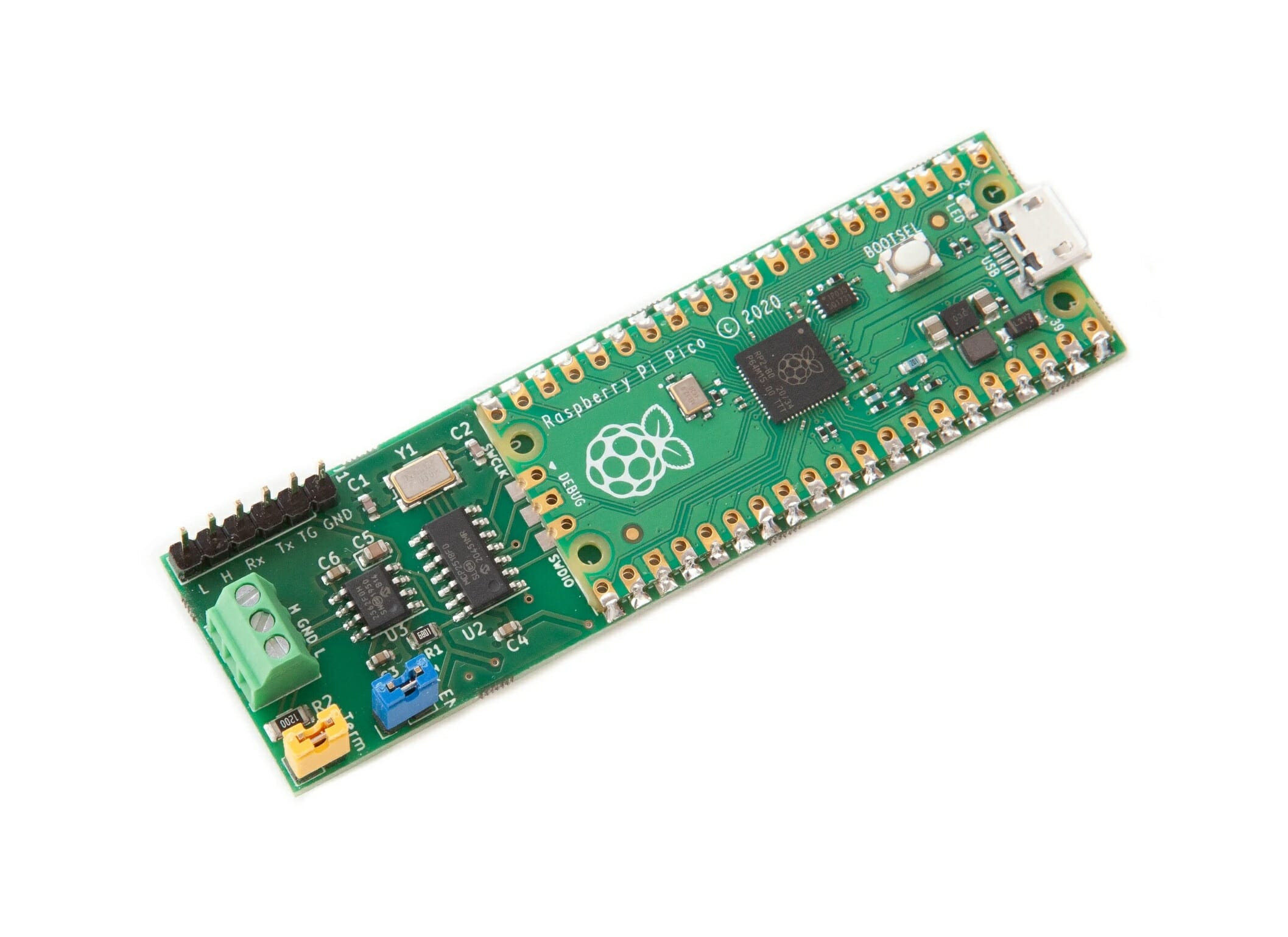
- MCU – Raspberry Pi Pico with RP2040 dual-core Cortex-M0+ microcontroller
- CAN interface through 3-pin terminal block implemented via:
- Microchip MCP2517/18FD (SPI) CAN controller with 2Kbyte buffer space
- Microchip MCP2562FD CAN transceiver.
- Misc
- Jumpers to connect a standard 120Ω CAN bus termination resistor and for disabling transmit access to the CAN bus
- 6-pin header for a logic analyzer or oscilloscope to see what’s happening on the bus
- Dimensions – Approx. 75 x 24mm
Ken Tindell, CTO of CANIS Automotive Labs, demonstrates sending CAN frames with the MicroPython CAN API and a logic analyzer with a CAN protocol decoder in the video below using the CAN Bus board fitted with a Raspberry Pi Pico.
CANPico is sold on SK Pang in the UK for £31.90 excluding VAT ($45.20) with Raspberry Pico pre-installed to the board.

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress



Looks good, but I would want a Pico-W for connectivity outside the Pico. Can we get this with headers installed install of a Pico? Would help if the Pico needed to be replaced.