
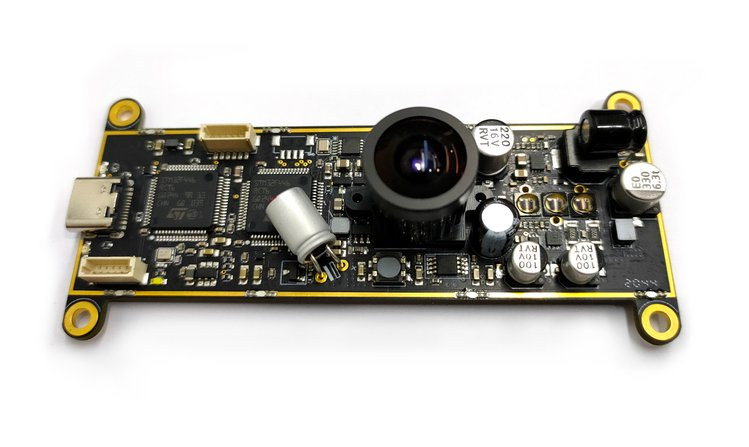
Onion is better known for its Omega IoT boards running OpenWrt, but the company has now come up with a completely different product: Onion Tau 3D depth camera equipped with a 160×60 LiDAR sensor.
The device plugs like a USB webcam to a host computer or board, but instead of transferring standard images, the camera produces 3D depth data that can be used to detect thin objects, track moving objects, and be integrated into other applications leveraging environment mapping such as SLAM (Simultaneous localization and mapping).

- Depth technology – LiDAR Time of Flight
- Depth stream output – 160 x 60 @ 30 fps
- Depth range – 0.1 to 4.5 meters
- Depth field of view (FOV) – 81 x 30°
- Grayscale 2D camera image sent with 3D depth map data
- Host interface – USB Type-C port
- Dimensions – 90 x 41 x 20 mm; 4x M3 mounting holes
Onion Tau LiDAR camera has just launched on Crowd Supply with a $10,000 funding goal. There’s a single reward for $179 that includes one camera. Shipping is $8 to the US and various TBD prices to other countries. Backers should expect to get their perk shipped at the end of May 2021.
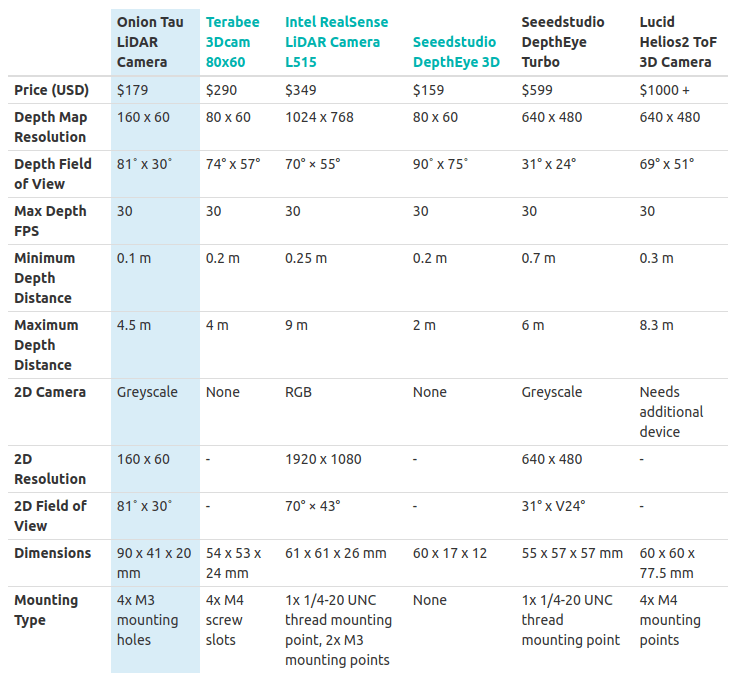
It’s not the first 3D depth camera based on a LiDAR sensor, and Onion has provided a comparison table against other models such as Intel RealSense L515 or Seeed Studio DepthEye 3D showing resolution, range, and other features of each model.

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress



With such price/resolution ratio this one does not too compelling. It’s half the price of Intel and tenth of it’s resolution on each axis. I’d better pay for Intel in that case.
Ironically, I came to the same conclusion (previously naive to the state of low-cost LIDAR) from their own comparison chart.
I notice the Onion one has the best minimum depth distance. Maybe that’s worth something to somebody.
They missed the opportunity to put Onion Tou imagery on it…